|
|
|
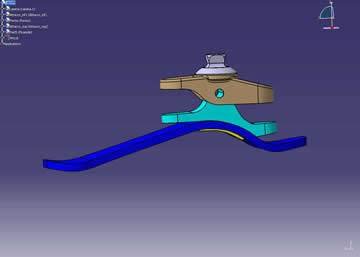
Soluzioni tentate Abbiamo sviluppato in parallelo due idee completamente differenti: una più simile a quella inizialmente commissionata (basata su due molle a compressione ed eventuali elementi smorzanti) ed una di nostra concezione che sfrutta una singola molla torsionale. Soluzione 1: due molle a compressione Noto l'andamento del momento alla caviglia abbiamo ricavato le costanti di rigidezza che permettessero la cinematica desiderata. Tuttavia effettuando simulazioni con il software Molle 2.0 abbiamo verificato che la combinazione tra gli elevati valori di rigidezza e corsa non consente l'utilizzo di molle lineari perchè queste si romperebbero a fatica; per questo motivo di solito i concorrenti sostituiscono almeno una delle due molle con un componente in elastomero (bumper). Rispetto alle protesi già in commercio si era comunque cercato di minimizzare la superficie a contatto con la lamina e di ridurre i pesi scavando il blocco inferiore. Sono anche state effettuate delle analisi FEM ipotizzando come materiale l'Hokotol (lega d'alluminio rivestita di materiale ceramico) che hanno dato esito positivo.
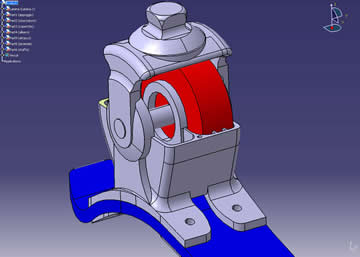
Non ritenendo innovativo l'accoppiamento molla-bumper, l'ing. Bonacini e noi abbiamo deciso di rinunciare a questa configurazione. Soluzione 2: molla torsionale In fase di progettazione ci siamo accorti che l'utilizzo di elementi elastici era finalizzato esclusivamente alla generazione di una coppia alla caviglia, quindi abbiamo avuto l'intuizione di introdurre un'unica molla torsionale che imprimesse tale momento. Nell'ideazione originale si prevedevano due vani distinti per molla e smorzatore rotativo viscoso (RVD), idea abbandonata per l'eccessivo ingombro degli smorzatori trovati in commercio (nell'immagine lo si può notare, in rosso).
Va inoltre sottolineato che in queste due soluzioni l'attacco alla lamina era stato inizialmente progettato con più punti di fissaggio. L'ing. Bonacini però ci riferito che bloccare la lamina in questo modo avrebbe portato alla rottura della stessa. |