|
|
|
Approccio al problema Si è innanzitutto tentato di capire la dinamica del passo e i carichi a cui la protesi è soggetta tramite una chiusura vettoriale su Matlab verificata e affinata in seguito con simulazione dinamica su UGS NX5. Per tali simulazioni è stato utilizzato un semplice schema costruttivo opportunamente parametrizzato con lo scopo di variarne la geometria secondo i risultati.
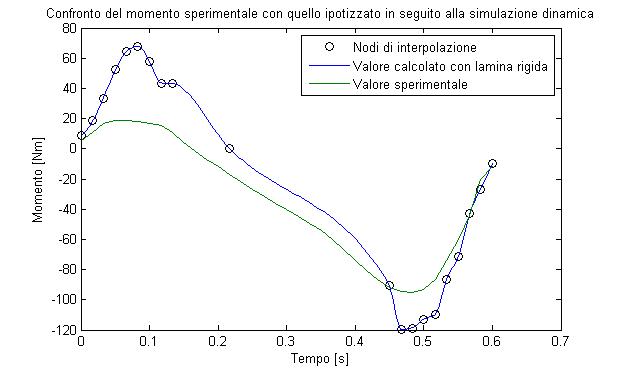
Non potendo impostare una simulazione multibody a corpi deformabili su NX5, abbiamo eseguito una simulazione dinamica a corpi rigidi. Questo primo approccio ha permesso di capire l'ordine di grandezza delle sollecitazioni e di conseguenza calcolare le costanti elastiche delle molle per ottenere la cinematica desiderata. Il grafico dei momenti ottenuto in questo modo è stato confrontato con le prove sperimentali che l'ing. Bonacini ci ha mandato in seguito al nostro secondo incontro.
Innanzitutto si può notare l'evidente vantaggio nell'utilizzo di una lamina in fibra di carbonio. Questa infatti, deformandosi, riduce notevolmente il braccio delle forze a cui è sottoposto il sistema sia in fase di appoggio che in fase di stacco. Inoltre dal grafico si evince che, una volta dimensionato l'elemento elastico che regola la flessione della caviglia, sarà impossibile continuare la progettazione senza l'ausilio di strumenti più avanzati. L'ipotesi che abbiamo assunto per questo lavoro è che la lamina si deformi ma non contribuisca alla risposta dinamica del sistema. Tale assunzione ha permesso di dimensionare il meccanismo senza tener conto della lamina. Poiché la dinamica del sistema dipende solo dagli elementi che costituiscono la caviglia, sarebbe interessante pensare di ridurre al minimo lo spessore della lamina o di realizzarla in un materiale meno performante della fibra di carbonio. Si è prestata attenzione alle vibrazioni che potrebbero insorgere in fase di volo, che quindi sono state mantenute sotto controllo tramite un'analisi dinamica in UGS e risolvendo l'equazione del moto per via analitica per entrambe le ipotesi che abbiamo portato avanti. |