|
|
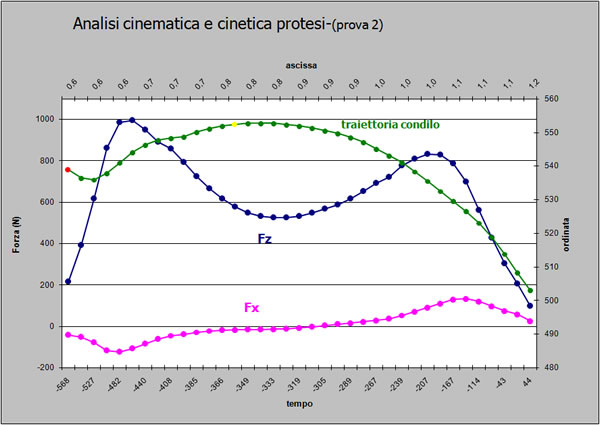
Dati Per avviare la progettazione ci sono stati forniti molti dati riguardanti la cinematica e la dinamica del passo ottenuti tramite prove sperimentali. Questi dati riguardavano sia arti sani che protesici. In particolare eravamo in possesso di: traiettoria del condilo femorale, traiettoria del malleolo, traiettoria della punta del piede e traiettoria del tallone. Da questi dati di cinematica del passo è stato ricavato l'angolo tra le due rette punta-tallone e condilo-malleolo in ogni istante, che ha svolto la funzione di parametro guida. La seconda parte dei dati riguardava l'evoluzione nel tempo delle forze scambiate con il terreno.
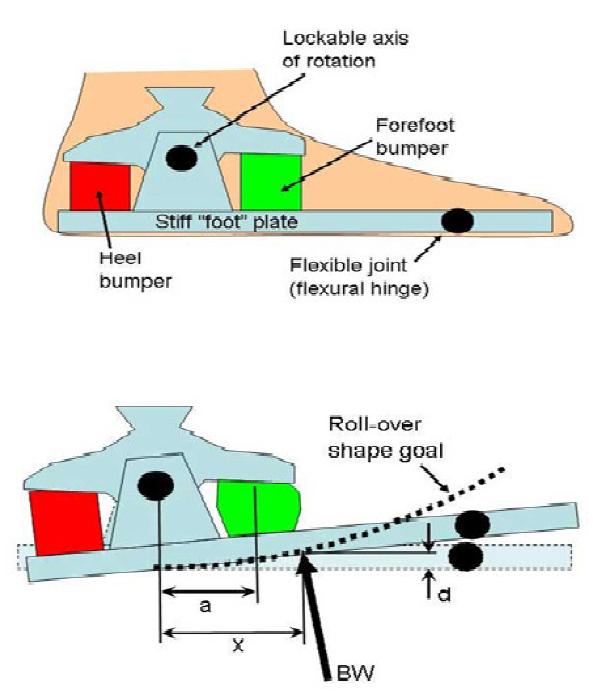
Fz è la reazione del pavimento in direzione verticale, positiva verso l'alto; Fx è la reazione in direzione d'avanzamento dovuta agli attriti e positiva se è concorde con il verso del movimento. Ci è anche stato mostrato uno schema di piede simile a quello che avremmo dovuto progettare:
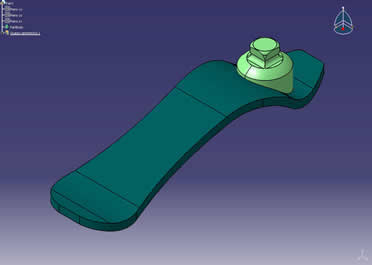
La caviglia è costituita da un perno che ruota vincolato ad una struttura metallica. La risposta dinamica è data da due elementi tipo "molla-smorzatore" che controllano l'angolo della caviglia, e dalla lamina in fibra di carbonio. Il compito inizialmente proposto era di adottare tale schema tentando di ottimizzare disposizione e risposta dei due elementi. In particolare ci era stato chiesto di sostituire gli elastomeri sfruttati dalla concorrenza con delle semplici molle che lavorano a compressione per limitare la dissipazione di energia data dallo smorzamento. La lamina inferiore in fibra di carbonio ci è stata fornita dall'ing. Bonacini sotto forma di matematica CAD assieme all'attacco piramidale standard per questo tipo di applicazioni (immagine catturata da CATIA):
|