Sperimentazione
Il
nostro obiettivo è stato quello di ottenere, durante
la deambulazione, la maggior spinta in avanti con il minimo
sforzo muscolare. Per raggiugere tale scopo abbiamo
realizzato un prototipo in acciaio in modo tale da poter
verificare sperimentalmente la migliore configurazione.
DINAMICA DELLA CAMMINATA
Il passo si può suddividere in 2 fasi
principali: una per t<tms
e l’altra per t≥tms
(dove per tms si
intende l’istante nel quale la pianta del piede è
comletamente appoggiata al terreno e la tibia è normale ad
essa).
Consideriamo la fase per t<tms.
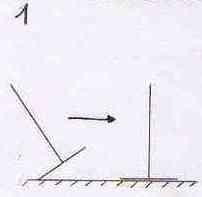
Quando il tallone tocca il suolo, la punta
della protesi comincia ad abbassarsi a causa del
trasferimento di carico da una gamba all’altra. In seguito a
questo spostamento la molla situata posteriormente si
comprime generando una coppia che tende ad imprimere una
rotazione oraria della tibia; è questa una conseguenza non
benefica poiché si generano delle sollecitazioni a livello
del bacino (più precisamente nel punto di contatto
femore-anca) che causano dolore. Nella configurazione
ottimale tale coppia dovrà avere il più piccolo valore in
modulo.
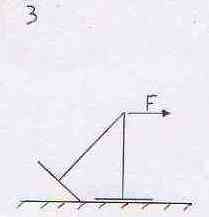
Valutiamo ora la fase per t≥tms
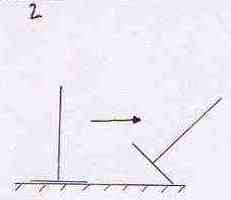
Partiamo anche questa volta da una
situazione nella quale tutte le coppie nella protesi sono
nulle (t=tms) ma, a
causa della forza che l’altra gamba imprime sull’arto in
esame(fig3), la tibia sarà costretta a ruotare, comprimendo
così la molla anteriore e generando, per equilibrio, una
coppia antioraria resistente. La molla comprimendosi
accumulerà energia potenziale Ep=1/2*k*x^2 che potrà
restituire solo
dopo che il tallone sarà sollevato, allungandosi, con una
conseguente spinta in avanti del corpo.
La chiave per ottimizzare questa fase sarà
quindi cercare la configurazione che permetta di sollevare
il tallone applicando la minima coppia.
ESPERIMENTO
Per valutare la configurazione ottimale
abbiamo generato una coppia costante sulla tibia collegando
la stessa all’estremità di un filo passante poi in una
carrucola, posta alla stessa quota, e con appeso un certo
volume di acqua contenuto in una bottiglia.
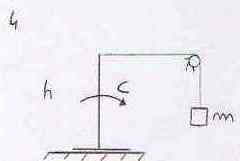
Si è potuto risalire alla coppia
applicata, necessaria per il sollevamento del tallone,
utilizzando la seguente formula:
C=m*g*h
Prima fase: t≥tms
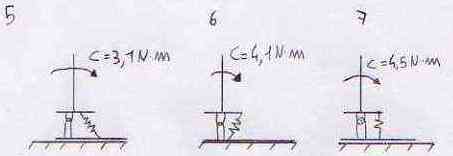
La configurazione ottimale è quella che
permette il sollevamento con la minore coppia,quindi la
numero 5.
Ultima fase: t<tms
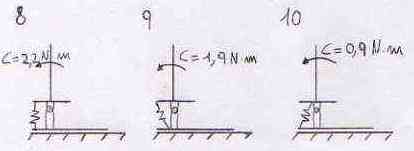
Anche in questo caso cerco la
configurazione con la coppia minima perché, anche se la
situazione ricreata è l’opposto di quella che si riscontra
camminando, la coppia che mi fa sollevare la punta (misurata
sperimentalmente) agirà in senso orario e, come è stato
motivato precedentemente è una conseguenza negativa.
Pertanto la scelta migliore è la numero
10.