Simulazione dinamica
Nota le rigidezze delle molle, a partire dalle forze
trasmesse al terreno
abbiamo calcolato le forze trasmesse alle molle
anteriori e posteriori al variare dell’angolo di
inclinazione delle stesse.
Per determinare le forze trasmesse alle molle
sono stati calcolati i seguenti angoli:
-
· L'angolo
a tra il suolo e la lamina
inferiore che è stato calcolato dalla cinematica del
piede
-
· L'angolo
b tra la verticale e la molla che è stato impostato e varia al variare delle
configurazioni
-
· L'angolo
c
compresa tra la
forza trasmessa al terreno e la sua componente verticale
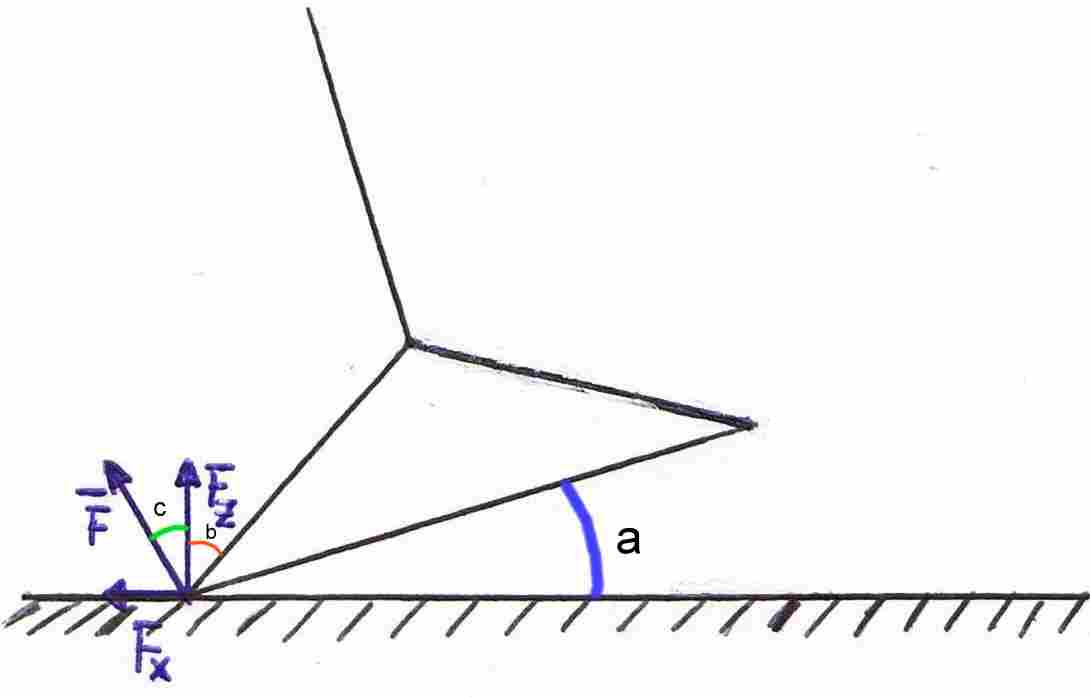
Noti gli angoli è stata calcolata la forza trasmessa alla
molla posteriore utilizzando la seguente formula:
Fm = F*cos(b+c-a)
Analoghe operazioni si ripetono per il calcolo delle forze
trasmesse alle molle posteriore e anteriore nelle altre due
fasi del passo e al variare della configurazione delle
molle,considerando di volta in volta gli angoli opportuni.
Dalle forze che si trasmettono alle molle dopo è stato
determinato il momento trasmesso alla caviglia, ottenendo i
seguenti grafici:
Questi grafici sono stati confrontati con il grafico del
momento alla caviglia ottenuto sperimentalmente su un piede
protesico.Dal confronto si osservano delle analogie e delle
differenze.
Dall’andamento del momento alla caviglia, tra tutte le
possibili configurazioni delle molle l'ottimale è:
· Molla
posteriore a 30° e anteriore a –30°
Gli angoli sono riferiti rispetto alla verticale e positivi
per rotazioni orarie.
Questa scelta è in accordo con le richieste prefissate:
· Momento
motrice nella prima fase IC e momento resistente
nella fase TO non troppo elevati, con andamento del momento lineare tra le due
fasi
· La massima
forza trasmessa alle molle è Fm = 870 N la quale
non determina la saturazione della molla
· La forza
ortogonale alla molla, che aumenta all'aumentare
dell'inclinazione della molla posteriore in senso orario e
di quella anteriore in senso antiorario, risulta minore in
questa configurazione.
Infine abbiamo analizzato la scelta della configurazione finale
considerando i seguenti problemi:
· Problema
della durata della prima fase del passo
· Problema
di dimensionamento della protesi