SERVOMOTORI
Il movimento di ciascun dito della mano è reso possibile attraverso la rotazione di una puleggia calettata su un servomotore. Il dimensionamento dei servomotori è stato effettuato usando lo schema riportato in figura.
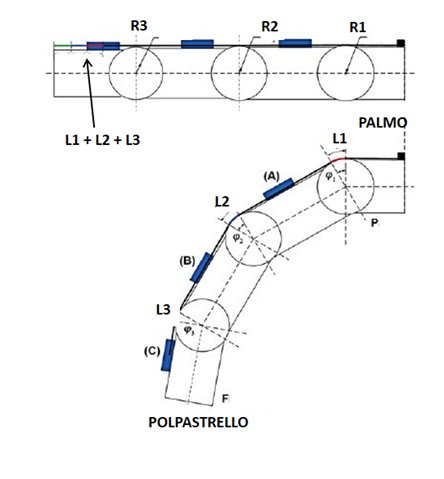
Usando questa modellazione per ogni singolo dito, è possibile valutare la velocità di rotazione richiesta dal dispositivo e il relativo numero di giri.
Per ciascuna falange, vengono individuate da dati antropometrici presenti in letteratura, le lunghezze R1, R2, R3 che permettono di ricavare la traslazione lineare del cavo richiesta per ciascun dito (nota la rotazione di ciascuna falange). Ricavata questa grandezza, dividendo per il raggio comune alle pulegge R, è possibile calcolare la variazione angolare, che deve essere minore di 160° poiché i servomotori hanno uno spostamento angolare massimo di 180°. Cautelandosi rispetto a questo valore si è scelto di adottare come valore massimo ammissibile 160°.
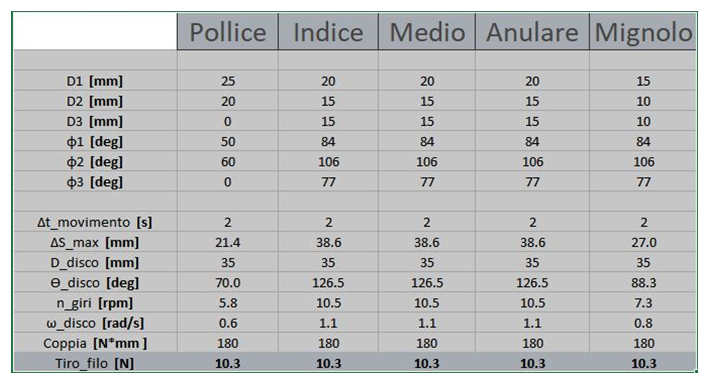
Per ciascun dito si determina la variazione angolare tale da rispettare il vincolo imposto.
Noto
questo valore è possibile calcolare la velocità angolare ipotizzando due secondi come intervallo temporale necessario alla movimentazione. Tale scelta è coerente
con la velocità fisiologica di apertura e chiusura della mano. Si ricava quindi il numero di giri in rpm.
Le figure mostrano i passaggi precedentemente descritti, le formule utilizzate e le grandezze considerate:

La scelta dei servomotori risulta conveniente e presenta i seguenti vantaggi:
- Conversione semplice del moto da rotatorio a lineare;
- Versatilità di utilizzo in termini di coppia (a seconda della tensione di alimentazione), numero di giri e angolo spazzato (0°-160°);
- Potenziale implementazione di sensori e circuiti per ottenere massima precisione e controllo dei movimenti;
- Temperatura d'esercizio: tra -10° e 50 °C.
I requisiti a cui abbiamo prestato particolare attenzione nella ricerca del modello più adatto sono i seguenti:
- La leggerezza e le dimensioni
ridotte. Anche se il peso dei servomotori non grava sul paziente stesso, è
comunque preferibile che la scatola che li contiene sia di facile
movimentazione;
- La capacità di ruotare secondo i versi orario e antiorario. Questo requisito è funzionale ai due movimenti contrapposti di apertura e chiusura della mano;
- Un numero di giri ridotto: dal dimensionamento delle pulegge, strettamente legato alla cinematica, è emerso come l'albero del servomotore debba ruotare ad un numero di giri molto basso;
- Una coppia necessaria a garantire il tiro della fune richiesto;
- L'economicità: i servomotori costituiscono il 45 % del costo totale del prodotto. Per una più dettagliata analisi dei costi si rimanda alla sezione dedicata.
La scelta è ricaduta su un servomotore a rotazione bidirezionale continua della Parallax Inc.
L'aspetto che deve essere considerato è quello relativo al loro posizionamento: saranno infatti inseriti in un case che li protegge e ne riduce la rumorosità.
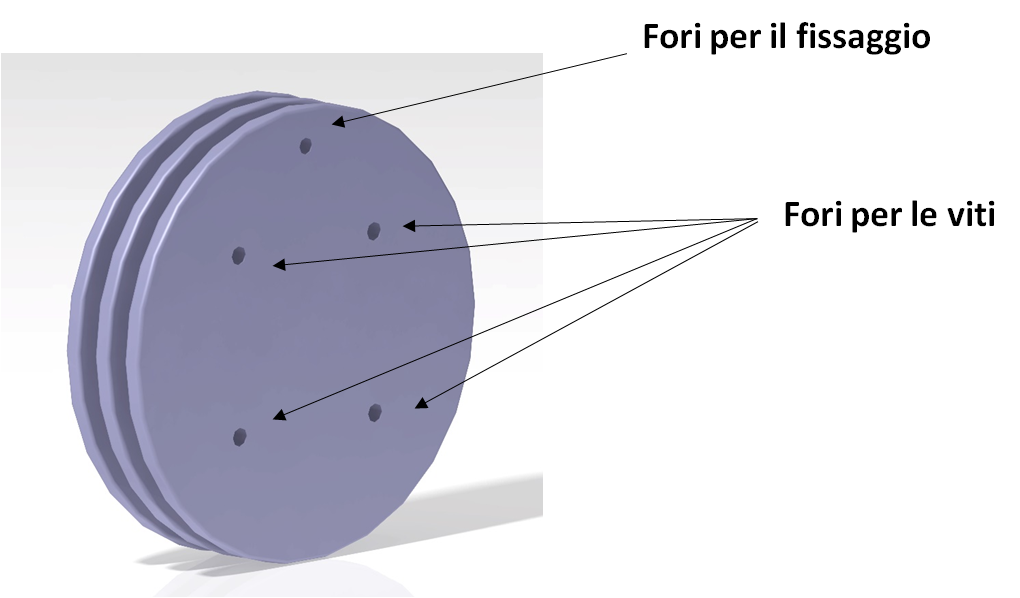
La trasformazione del moto rotatorio in lineare viene effettuata tramite una puleggia di PLA stampata in 3D. Quest'ultima verrà fissata tramite collegamento filettato alla flangia in dotazione a ciascun servomotore. La puleggia subirà prima un processo di maschiatura con utensili opportuni per creare la filettatura.
Per semplificare il processo produttivo e ridurre i costi, le pulegge sono state dimensionate in maniera tale che la geometria non cambi a seconda del dito a cui viene associata. La variabilità di ciascun dito, in termini di escursione angolare, viene scaricata sull'angolo di rotazione dell'albero del servomotore. Inoltre, per motivi analoghi, si è scelto di utilizzare cavi di lunghezza uguale per ciascun dito.
La configurazione prevede l'utilizzo di cinque pulegge, ciascuna responsabile del movimento di chiusura e di apertura di un dito. Le due cave simmetriche a sezione triangolare permettono il parziale avvolgimento dei due cavi. Questi ultimi verranno fatti passare attraverso due fori in prossimità del bordo della flangia e fissati con un nodo. Il cavo di apertura viene indirizzato, con l'aiuto della guaina, verso il dorso della mano, mentre quello di chiusura verso il palmo.
Tale configurazione permette di effettuare i movimenti
di grasp e pinch utilizzando un singolo servomotore, alternando il verso del moto rotatorio.