Ground Interceptor Drone
Drone terrestre per applicazioni industriali
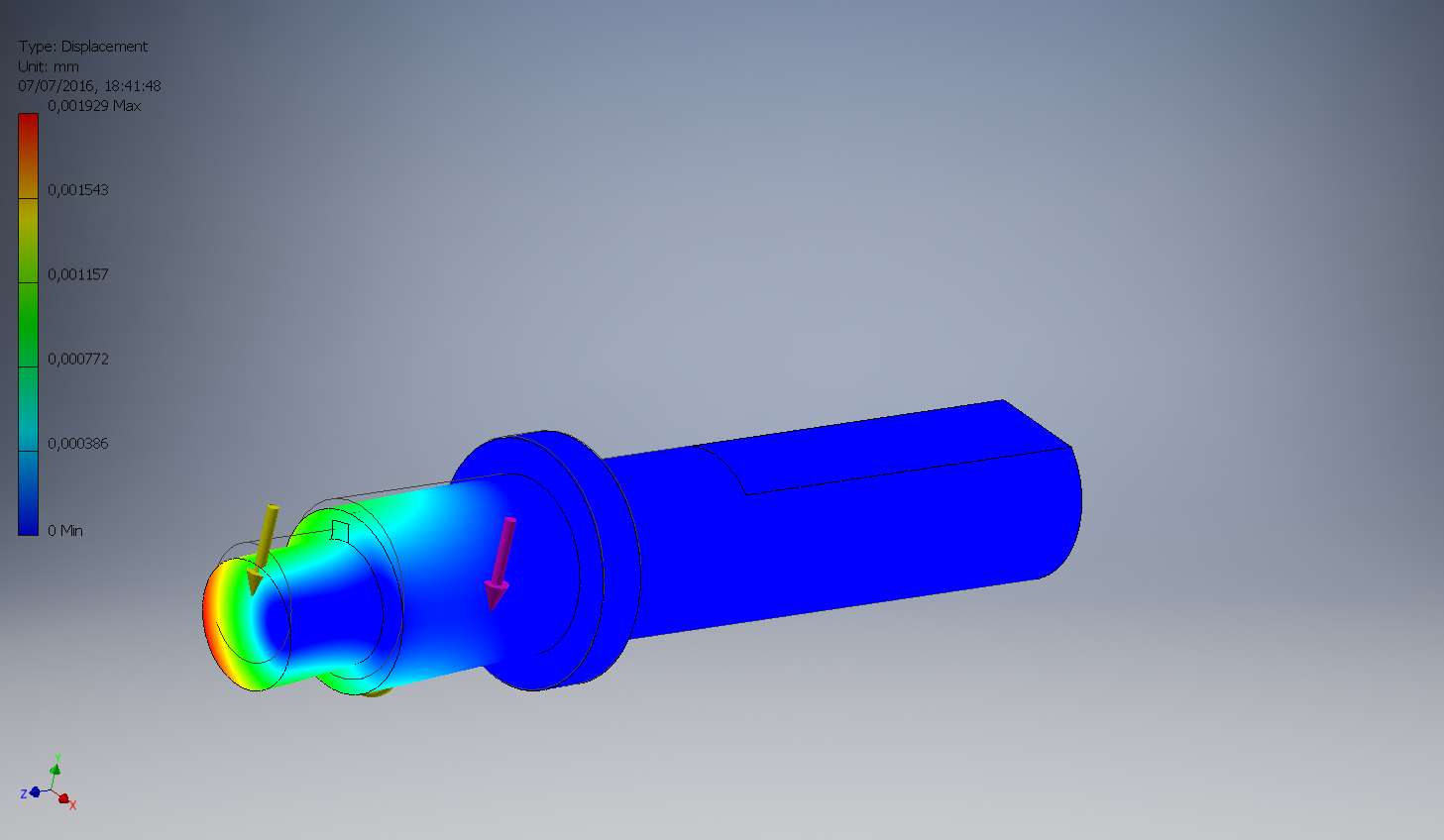
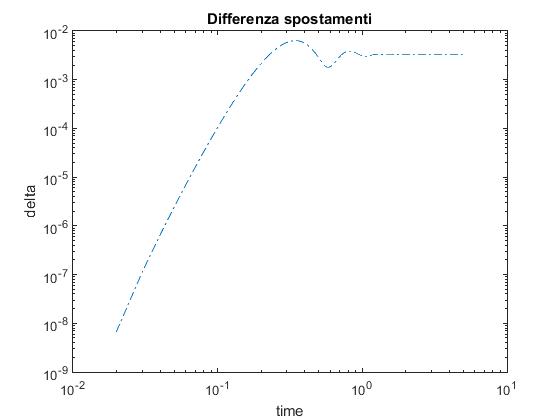
Spostamenti nell'albero di trasmissione
|
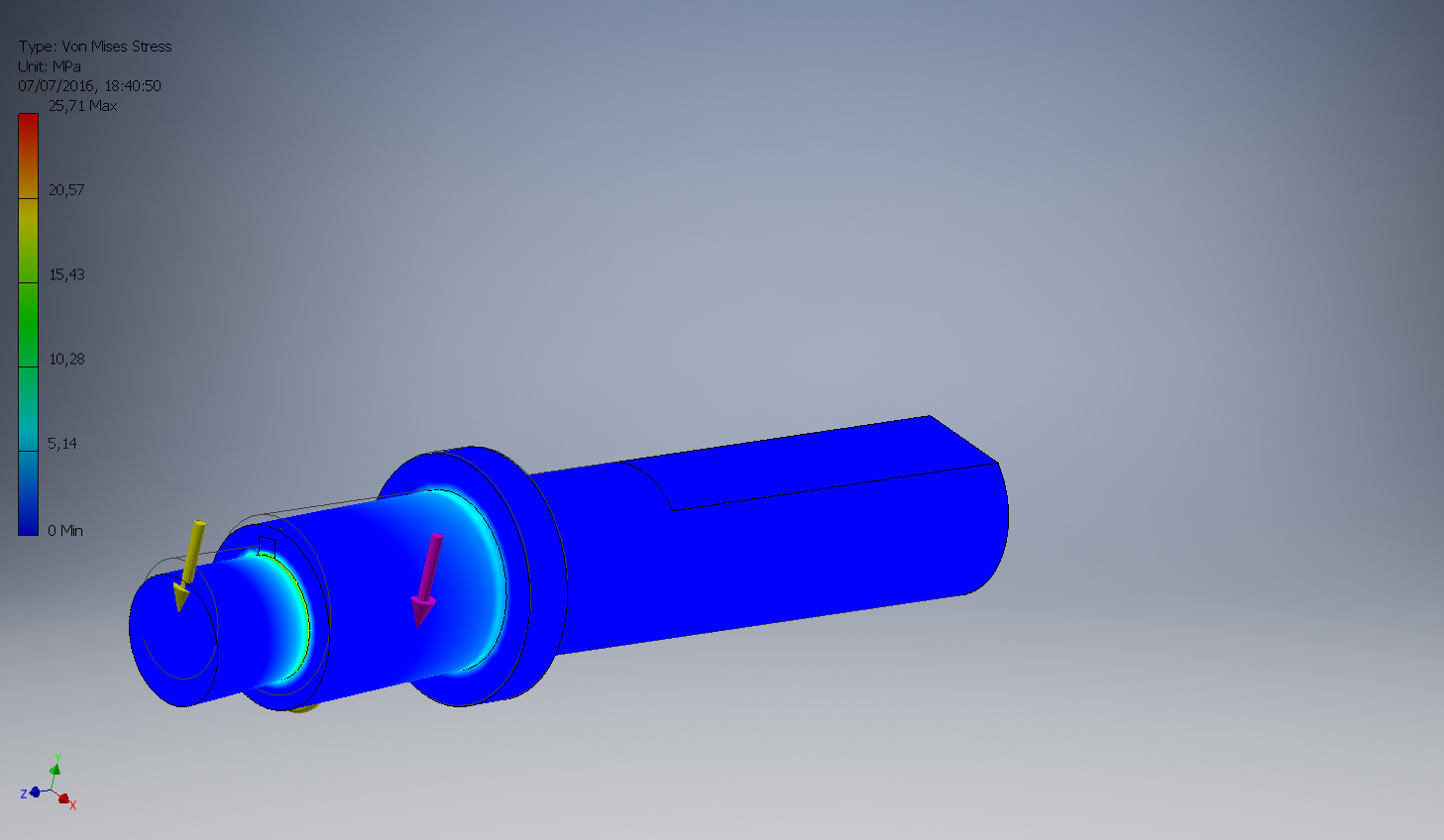
Sforzi di Von mises nell'albero di trasmissione
|
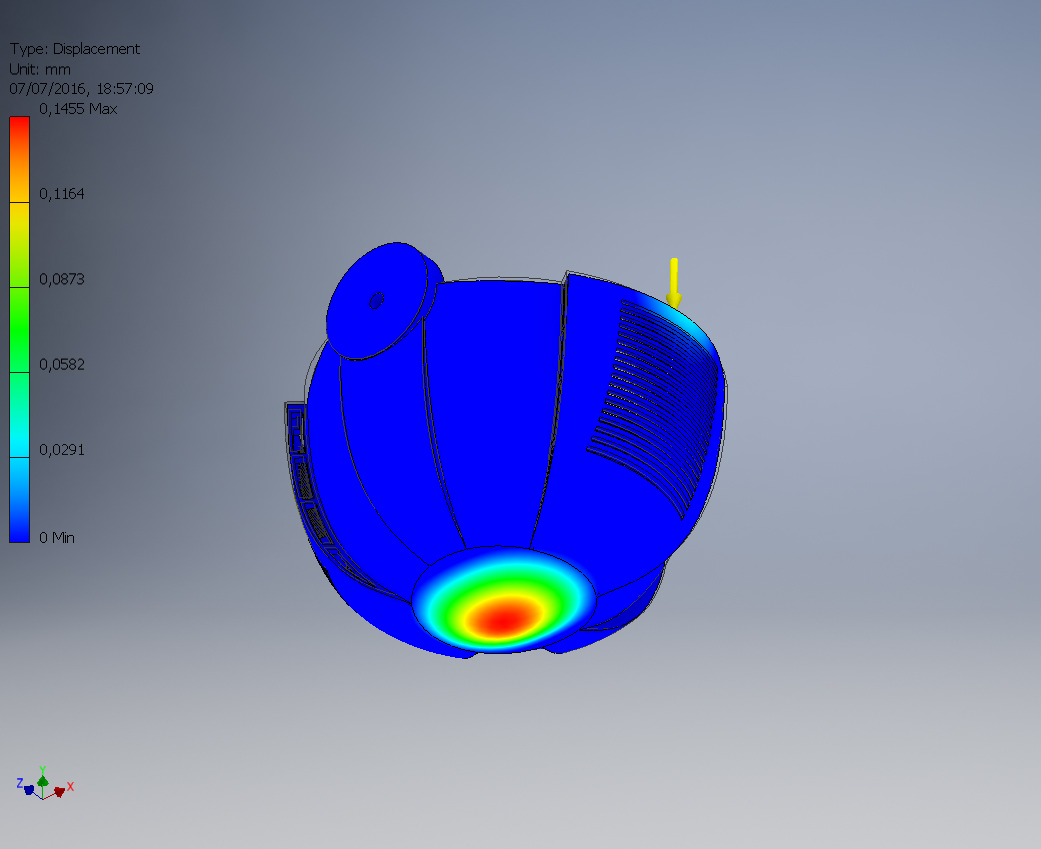 Spostamenti nella scocca
|
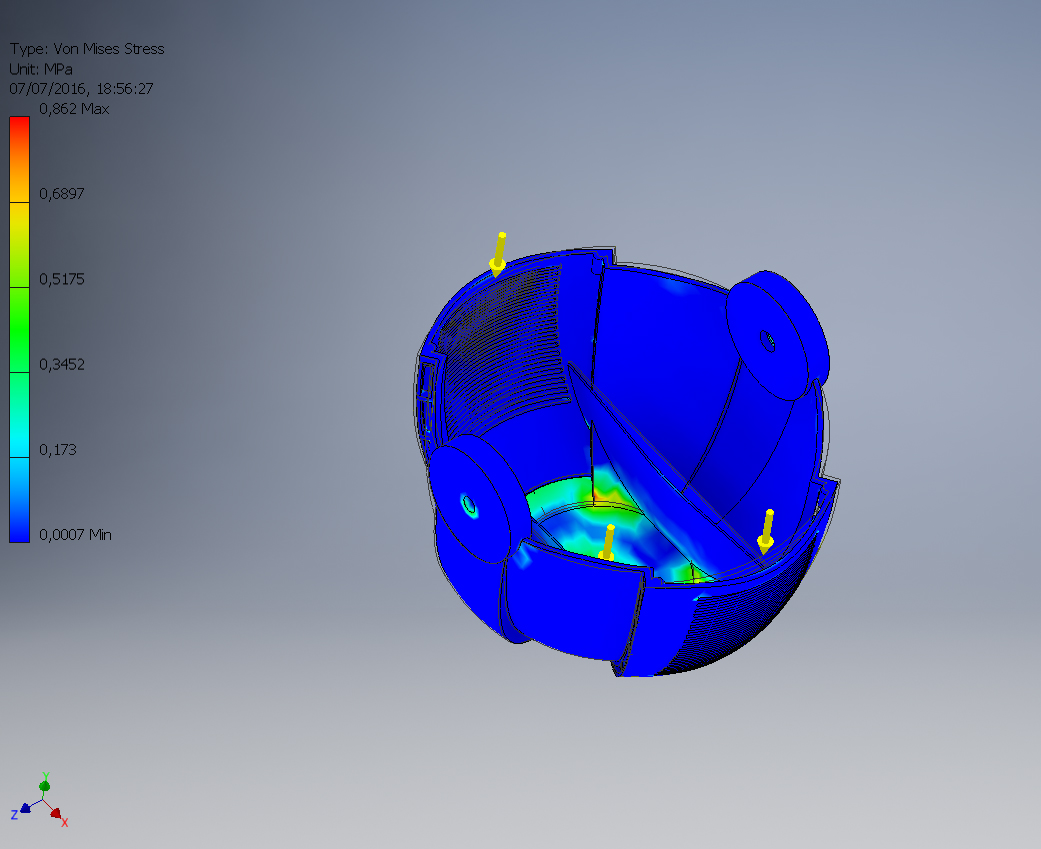 Sforzi di Von Mises nella scocca
|
 Spostamenti nella ruota
|
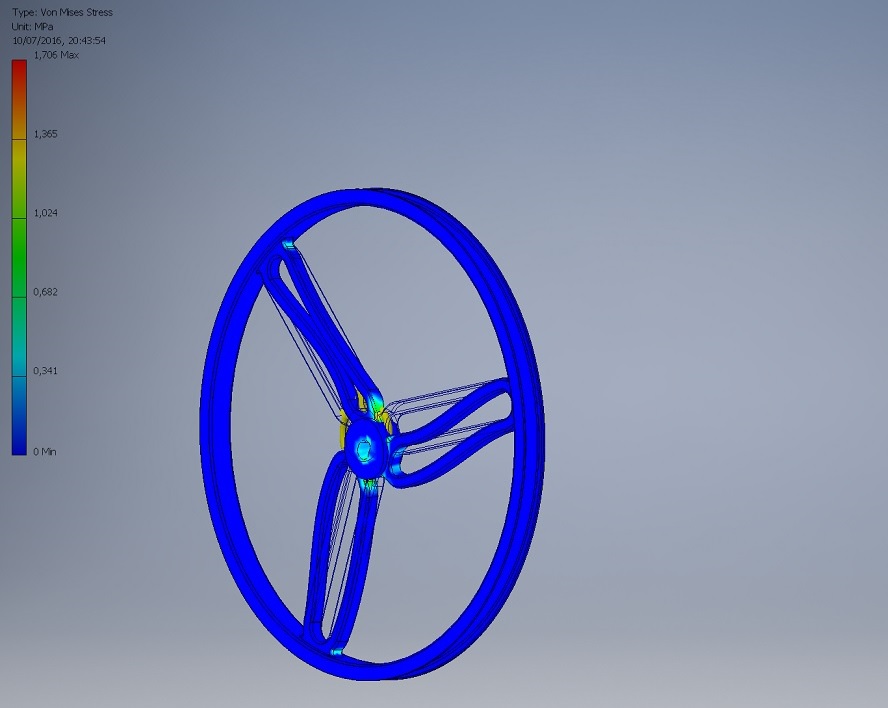 Sforzi di Von Mises nella ruota
|
 |
 |