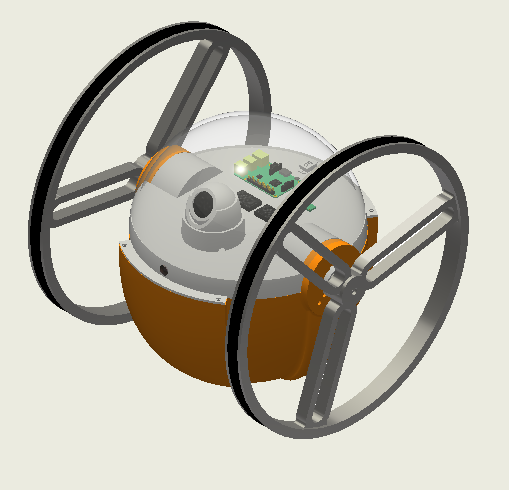
Ground Interceptor Drone
Drone terrestre per applicazioni industriali
Fin dall'inizio, per la propulsione del nostro drone terrestre,
abbiamo studiato due risposte differenti al problema dell'autonomia:
l'utilizzo di batterie a litio-polimeri (LiPo) o di supercapacitori.
Le due soluzioni sono complementari in termini di vantaggi e
svantaggi e fanno sì che il cliente possa scegliere la soluzione più
adatta ai suoi scopi.

Supercapacitori 16 celle Maxwell serie K2 (BCAP3000 P300 K04) da 3V ciascuno offrono una durata della carica di circa un'ora e un tempo di ricarica minore di 5'. Permettono quindi, a scapito di soste relativamente frequenti ma altrettanto brevi, un'automatizzazione totale della gestione del drone tramite stazioni di ricarica predisposte sul percorso dello stesso. Uno sviluppo futuro potrebbe essere quello di stazioni di ricarica automatizzata a cui il drone possa agganciarsi in automatico.
Sono inoltre garantiti per un numero di cicli di carica/scarica
nell'ordine di 10^6. Il costo di questa soluzione è stimato in 1440$. |

LitioPolimeri 14 celle Lipol LP924990 da 11.1V e 5000mAh. Offrono una durata della carica di circa 18 ore con tempi di ricarica dell'ordine delle 24 ore. Ciò permette un'operatività ininterrotta per un considerevole lasso di tempo con la necessità di un altrettanto lungo periodo di stop per la ricarica. Può essere in questo caso conveniente l'intervento di un operatore per la sostituzione diretta della batteria o l'utilizzo di più droni affiancati. Per quanto questo tipo di batterie rappresenti lo stato dell'arte nel settore la quota di cicli di carica/scarica garantita è circa 500. Il costo del singolo pacco di batterie è stimato in 1120$. |
  |
  |
La questione del peso e l'ingombro differente delle due soluzioni (8,16kg per i supercapacitori e 6,02kg per le LiPo) è stata affrontata nell'analisi di producibilità del GID.