 Politecnico
di Milano – Facoltà di Ingegneria Industriale
Politecnico
di Milano – Facoltà di Ingegneria Industriale
![]() Corso di
Laurea in Ingegneria Meccanica
Corso di
Laurea in Ingegneria Meccanica
Laboratorio progettuale CAD – Prof. Cascini
Anno Accademico 2009/2010
Cinematica
La configurazione
della sospensione scelta si ispira a quella della Ducati Monster; essa presenta
uno schema del tipo in figura:

Secondo
questo sistema l'ammortizzatore non è infulcrato sul telaio come nella maggior
parte delle moto, ma al forcellone e di conseguenza con l'avvicinarsi della
ruota al telaio risulta compresso ad entrambe le estremità.
Questa
soluzione elimina un attacco al telaio e ne aggiunge uno al forcellone, così
che il leveraggio complessivo costituito da mono, bilanciere e puntone conta
due attacchi al forcellone e uno al telaio, dove si impernia il vertice del
triangolo descritto dal bilanciere.
Ai fini
dell'analisi cinematica lo schema scelto può essere schematizzato come segue:
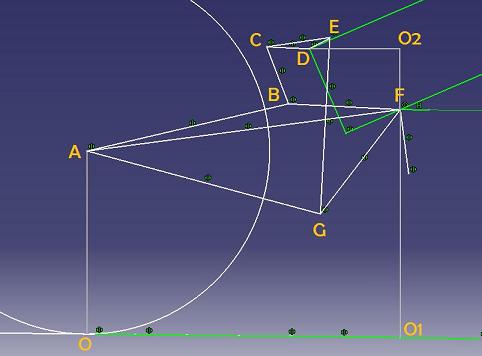
Si riportano
di seguito le dimensioni necessarie per l'analisi cinematica, che vanno
inserite nel programma Matlab implementato per la risoluzione della cinematica:
% quote puntone
BC = 125; %[mm] quota da variare
BC_0 = BC; %[mm]
% quote mono
EG = 309; % [mm]
EG_0 = EG; %[mm] % interasse tra
gli estremi del mono in condizioni statiche
% quote bilanciere
CD = 84; % quota da variare [mm]
DE = 48; % quota da variare [mm]
CE = 130; % quota da variare [mm]
% angoli bilanciere (teorema di Carnot)
CDE = acos(-(CE^2-DE^2-CD^2)/(2*DE*CD)); %[rad]
% quote forcellone
FO1 = 436.138; %[mm] altezza da terra del punto F in posizione
statica con
% puntone di 125mm e lunghezza del mono in posizione statica
di 309mm
DO2
= 157; %[mm]
O2F
= 102; %[mm]
AF =
545; %[mm]
BF =
193.2; %[mm]
GF =
226.2; %[mm]
AB =
356.7; %[mm]
AG = 417; %[mm]
BG = 197.2; %[mm]
% angoli forcellone (teorema di Carnot)
ABF
= acos(-(AF^2-AB^2-BF^2)/(2*AB*BF)); %[rad]
FAB
= acos(-(BF^2-AB^2-AF^2)/(2*AB*AF)); %[rad]
GAB
= acos(-(BG^2-AG^2-AB^2)/(2*AG*AB)); %[rad]
AGF
= acos(-(AF^2-AG^2-GF^2)/(2*AG*GF)); %[rad]
AFG
= acos(-(AG^2-GF^2-AF^2)/(2*GF*AF)); %[rad]
Le quote
indicate con la dicitura “da variare” costituiscono i gradi di libertà nella
scelta dei parametri che si hanno nel dimensionamento del leveraggio prolink.
I valori
riportati per la lunghezza del puntone e per i lati del triangolo del
bilanciere sono quelli finali, stabiliti grazie al programma, nel quale sono
stati inseriti vari set di parametri, per poi scegliere quello che meglio
soddisfa i vincoli di progetto.
Tali vincoli
riguardano la corsa massima del mono di 70mm (da non utilizzare necessariamente
per intero) a fronte di uno scuotimento massimo di 120mm e la pendenza della
retta della legge di progressione pari a 2,1.
Inoltre si
desidera che la legge di progressione si mantenga il più possibile indipendente
dalla regolazione del puntone e la condizione ideale è dunque rappresentata da
un fascio di rette che collassano in una unica.
A questi si
aggiungono i vincoli sull'altezza da terra della sella e sulla regolazione del
puntone per variare l'altezza della moto, che sono stati verificati in seguito,
attraverso uno sketch in Catia. Con questo schizzo sono pure stati
costantemente monitorati gli ingombri di massima al variare dello scuotimento
imposto al forcellone e della lunghezza del puntone (vedi sezione Configurazione definitiva).
Altri
parametri su cui si può intervenire sono la rigidezza della molla e il
precarico:
K_Molla = 85; % [N/mm] da variare tra 85 e 95 N/mm
precarico = 10; % [mm] per quanto riguarda il precarico, il
valore presente nel programma tiene conto della
compressione
iniziale della molla, dovuta al registro di precarico della molla. Se la
lunghezza
libera della molla è x, una volta montata si
deve sempre garantire che il componente sia
compresso, così che se si misura la molla una
volta montata risulta essere x-y (dove y è un
valore a discrezione ma sicuramente maggiore
di 5).
A questo si somma un
ulteriore precarico, ottenuto ruotando la ghiera o il registro presente
sul mono.
Ne segue che se si misura nuovamente
la molla una volta che il mono è pronto per essere
montato, perciò in ordine di marcia, questa
sarà lunga x-y-z; il precarico sarà pertanto y+z.
Si può
inoltre agire sull'interasse in condizione statica tra gli estremi del
monoammortizzatore, che può variare all'interno di un range di ampiezza 10mm
nell'intorno di 304mm.
Nella scelta
di questi parametri liberi si deve agire, oltre che nel rispetto dei vincoli di
progetto dati, pure nella direzione di una riduzione dei carichi interni,
soprattutto per quanto riguarda il puntone, in sostanza una biella caricata a
compressione, condizione critica per quanto riguarda la resistenza del pezzo.
Per questo
motivo, è stato deciso di ridurre la costante di rigidezza della molla fino a
85 N/mm e di incrementare l'interasse iniziale dell'ammortizzatore fino a
309mm.
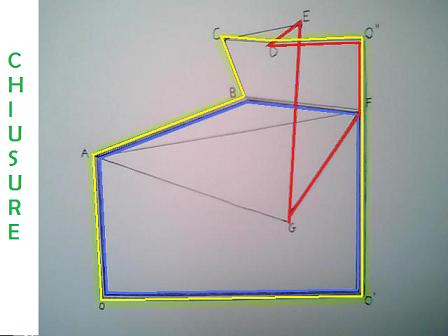
Il programma
implementato risolve le seguenti chiusure cinematiche:
% chiusure cinematiche ausiliarie (relazioni
fra angoli)
xBF = xAB+pi+ABF;
xDE = xCD-pi-CDE;
xGF = pi-GAB+xAB-AGF;
% chiusure cinematiche
% chiusura
cinematica blu
fff(1) = OA * cos(xOA) + AB * cos(xAB) + BF *
cos(xBF) + FO1 * cos(xFO1) + O1O * cos(xO1O);
fff(2) = OA * sin(xOA) + AB * sin(xAB) + BF *
sin(xBF) + FO1 * sin(xFO1) + O1O * sin(xO1O);
%chiusura
cinematica gialla
fff(3) = OA * cos(xOA) + AB * cos(xAB) + BC *
cos(xBC) + CD * cos(xCD) + DO2 * cos(xDO2) + O2F * cos(xO2F) + FO1 * cos(xFO1)
+ O1O * cos(xO1O);
fff(4) = OA * sin(xOA) + AB * sin(xAB) + BC *
sin(xBC) + CD * sin(xCD) + DO2 * sin(xDO2) + O2F * sin(xO2F) + FO1 * sin(xFO1)
+ O1O * sin(xO1O);
%chiusura
cinematica rossa
fff(5) = DE * cos(xCD-pi-CDE) + EG * cos(xEG) + GF *
cos(xGF) - DO2 * cos(xDO2) - O2F * cos(xO2F);
fff(6) = DE * sin(xCD-pi-CDE) + EG * sin(xEG) + GF *
sin(xGF) - DO2 * sin(xDO2) - O2F * sin(xO2F);