![]()
 Politecnico
di Milano – Facoltà di Ingegneria Industriale
Politecnico
di Milano – Facoltà di Ingegneria Industriale
Corso di Laurea in Ingegneria Meccanica
Laboratorio progettuale CAD – Prof. Cascini
Anno Accademico 2009/2010
Dinamica
Per quanto
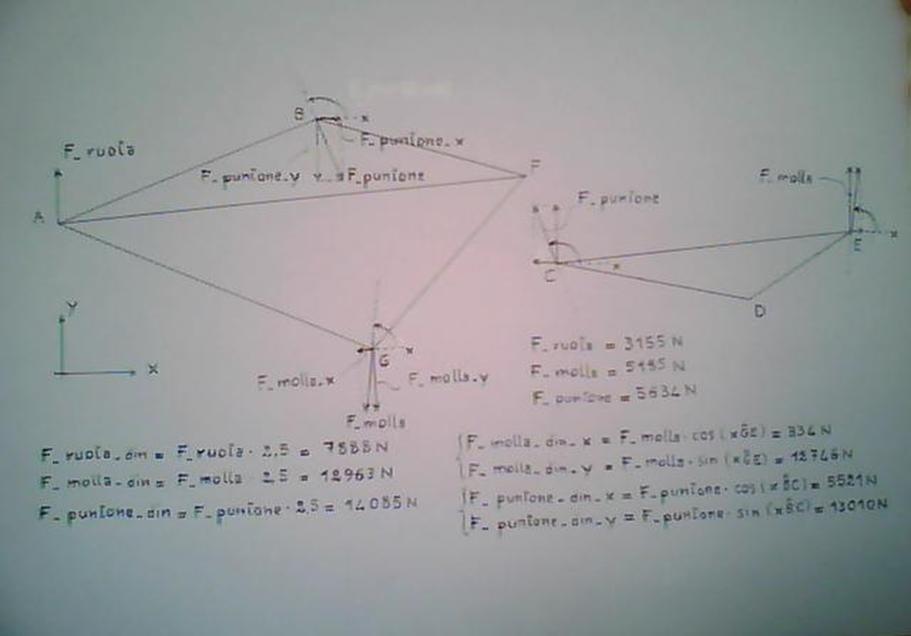
riguarda la dinamica, si effettuano due equilibri ai momenti:
% forza elastica del mono
F_molla = K_Molla * (EG_0 - EG + precarico);
% forze
F_molla_o =
F_molla*cos(xGE) ;
F_molla_v = F_molla*sin(xGE)
;
F_puntone_o = F_puntone*cos(xBC) ;
F_puntone_v = F_puntone*sin(xBC) ;
% equazioni di bilancio momenti
% bilancio momenti attorno al punto F (pivot)
ggg(1) = -F_ruota*AF*cos(xAF+pi) +
F_molla_v*GF*cos(xFG) - F_molla_o*GF*sin(xFG) - F_puntone_o*BF*sin(xFB) +
F_puntone_v*BF*cos(xFB) ;
% bilancio momenti attorno al punto D
ggg(2) = -F_molla_o*DE*sin(xDE) +
F_molla_v*DE*cos(xDE) - F_puntone_o*CD*sin(xDC) + F_puntone_v*CD*cos(xDC) ;