
.png)
Specifiche e Vincoli
Prima e durante lo sviluppo del tema progettuale Roadrunnerfoot Engineering S.r.l., tramite l’ingenere project manager Pietro Cecini, ha fornito una serie di specifiche e vincoli su cui articolare il lavoro. A questi si sono aggiunti limiti dettati dal buon senso.
- Peso del tutore: entro 2.5 kg
- Costo contenuto
- Prestazioni: normale deambulazione e superamento ostacoli (gradino, marciapiede etc)
- Lunghezza aste tibia e femore: max 300x50x20 mm
- Altezza tutore in completa distensione: 650 mm
- Ingombro articolazione ginocchio: max 100X50 mm
- Coefficiente minimo sicurezza per analisi degli sforzi:2
- Sistema di fissaggio alternativo al velcro classico dei tutori (non sufficiente per un esoscheletro)
- Struttura modulare per consentire una personalizzazione senza costi esagerati
Superamento Ostacoli
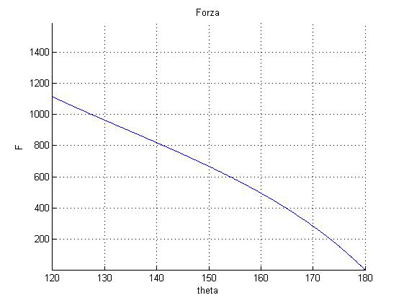
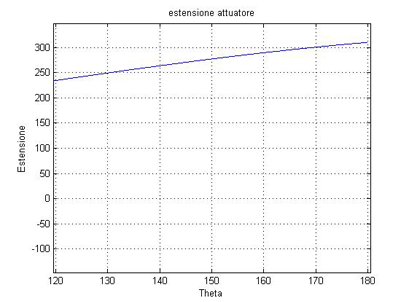
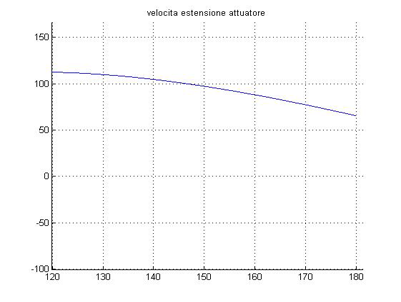
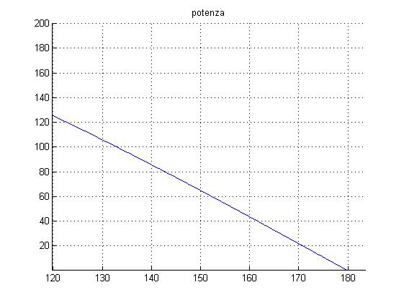
Il tutore attuato ha l’obiettivo di assistere il paziente nella deambulazione e nel superamento degli ostacoli posti dalla vita quotidiana. Per tale motivo è stata necessaria un’analisi preliminare della cinematica e della dinamica in gioco durante la salita di un gradino (attività tra le più stressanti che deve subire il ginocchio), atta a fornire i dati di partenza e i requisiti minimi per la parte strutturale e per il sistema di attuazione. A seguito di rilevazioni effettuate su un soggetto di 75 kg intento a salire un gradino di altezza 25 cm e di misurazione delle lunghezze degli arti, è stato possibile implementare uno script in Matlab che ha fornito tutti i dati di partenza riguardanti angoli, velocità, forze, leve, coppie, potenze richieste all’attuatore, range di estensioni e velocità di sfilo dello stesso. Una volta ottenuti i dati necessari è cominciata la progettazione vera e propria dell’esoscheletro.
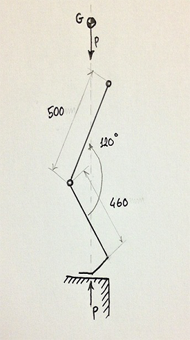
Requisiti Dinamici
Coppia di picco sul ginocchio: 120 Nm
Escursione attuatore max: 110 mm
Potenza di picco richiesta: 130 W
Forza di picco: 1115 N
Velocità sfilo max: 110 mm/s
Nota: lo script permetteva di variare le distanze dei punti di applicazione
dell’attuatore dal ginocchio e la sporgenza degli attacchi dalla linea media della
gamba. In tale maniera è stato possibile successivamente ricercare la configurazione
migliore per l’attuatore.