
.png)
Il primo concetto di massima del tutore presenta due soluzioni per quanto riguarda lo snodo della struttura in prossimità del ginocchio, mentre il resto del tutore rimane invariato.
Struttura Portante
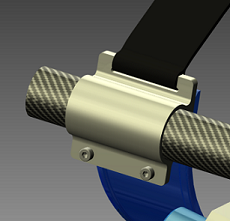
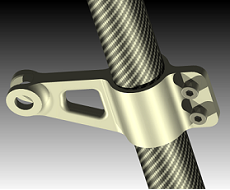
La struttura portante (che rimane invariata) è costituita da 2 tubi in carbonio di D_ext 22 mm e spessore 2 mm. Il tubo superiore, per lasciare spazio sufficiente all’attacco dell’attuatore, è stato pensato di lunghezza pari a 300 mm. Quello inferiore presentava minori necessità di spazio e, per adattarsi meglio alla tibia, che è sensibilmente più corta del femore, è stato pensato di 200 mm di lunghezza. Tali componenti tubolari sono da assicurarsi sul lato esterno del tutore per garantire minore ingombro durante il moto delle gambe, pensando il possibile impiego di un secondo tutore simmetrico sulla gamba sinistra.
Su entrambi i tubi in carbonio sono stati ipotizzati due attacchi che consentono il fissaggio di fasce in materiale plastico flessibile, che andranno ad avvolgere la gamba consentendo quindi di assicurare la struttura portante all’arto del paziente. La lunghezza è stata posta di 45 mm, per consentire il fissaggio di una fascia plastica di tale larghezza, e una cinchia di tessuto di larghezza 30 mm nell’asola.
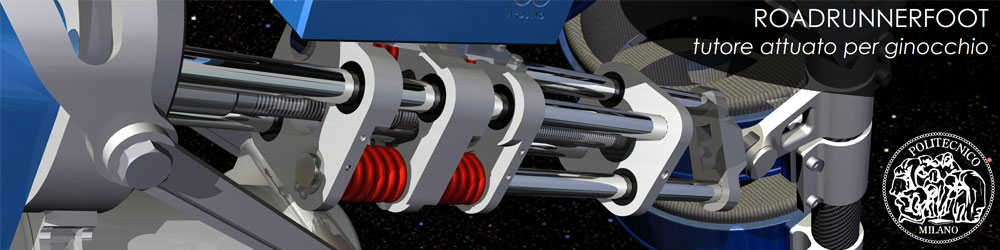
Infine sono presenti due strutture in acciaio, una a forcella e una planare. Queste hanno lo scopo di assicurare l’attuatore ai tubi e fornire allo stesso le leve necessarie per esercitare un momento attorno all’articolazione. Partendo dai dati di Matlab sono state imposte delle distanze di 50 mm tra l’asse del tubo in carbono e il foro dove va ad inserirsi l’estremità dell’attuatore. Seguendo i dati estrapolati al calcolatore sono anche state imposte delle distanze di queste strutture dall’asse del ginocchio di 240 mm e 70 mm, rispettivamente per la parte superiore e per quella inferiore.
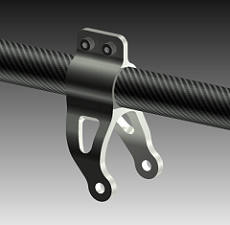
Concept A
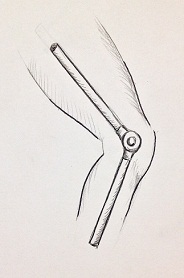
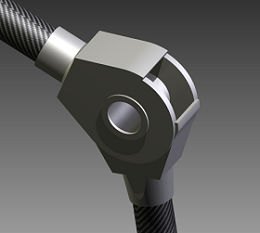
Lo snodo in prossimità del ginocchio è stato oggetto di studio sin dall’inizio, e il progetto è stato portato avanti in parallelo con due soluzioni diverse per questo componente. La prima prevede una cinematica a cerniera semplice, con CIR fisso. Rispetto al concept B offre un vantaggio e uno svantaggio.
Questo componente dovrebbe presentare un ciclo tecnologico meno dispendioso della seconda proposta. Tuttavia schematizzare la cinematica del ginocchio con una cerniera pura risulta essere una grossolana approssimazione. Questo elemento, inserito in un esoscheletro, potrebbe generare degli stress sull’articolazione del paziente.
La struttura del giunto è stata pensata nella maniera più semplice possibile per facilitarne la realizzazione: in tutto 3 componenti, due parti rotanti con un perno per mantenere questi ultimi in asse tra loro. Diametro di 60 mm e spessore di 30.
Concept B
La seconda soluzione prevede l’utilizzo di un brevetto della KTJ Research , risultato di uno studio condotto sull’articolazione del ginocchio. È stato infatti tracciato un profilo che potesse seguire al meglio la rotazione della tibia sul femore, in seguito a diverse rilevazioni sperimentali
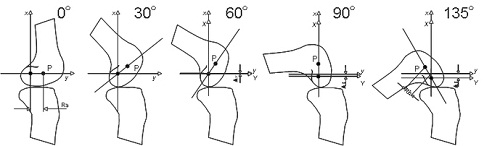
La soluzione prevede uno snodo analogo al primo per quanto riguarda spessore e diamentro, ma con la presenza di due perni al posto di uno e due guide sagomate con la geometria richiesta (come da cinematica KTJ). Anche qui è stata ideata una struttura che fosse realizzabile con processi tecnologici non troppo dispendiosi. Entrambi i concept potrebbero essere realizzabili, l’ultima parola viene lasciata alle verifiche meccaniche e ad una futura analisi di fattibilità.
La parte restante
Per quanto riguarda la parte interna rispetto alla gamba è stata utilizzata la struttura esistente di un comune tutore per ginocchio poiché non richiede caratteristiche strutturali. Per il fissaggio si è pensato un sistema di fasce di materiale plastico flessibile da far passare sotto alla gamba per congiungere parte esterna e parte interna del tutore. Tali fasce potrebbero essere disponibili di misure diverse per permettere un adattamento del tutore al paziente.
Per bloccare infine il tutto sono state pensate delle cinghie di tessuto plastico da far passare nelle asole degli attacchi di alluminio, da stringere manualmente. Infine per non recare troppo disagio al paziente sono stati pensati degli anelli di materiale plastico schiumoso da interporre tra le fasce e la gamba.
È stato poi aggiunto il modulo Arduino Leonardo , per il controllo elettronico dell’attuatore, fissato sul tubo di carbonio superiore.