
.png)
Obiettivi Raggiunti
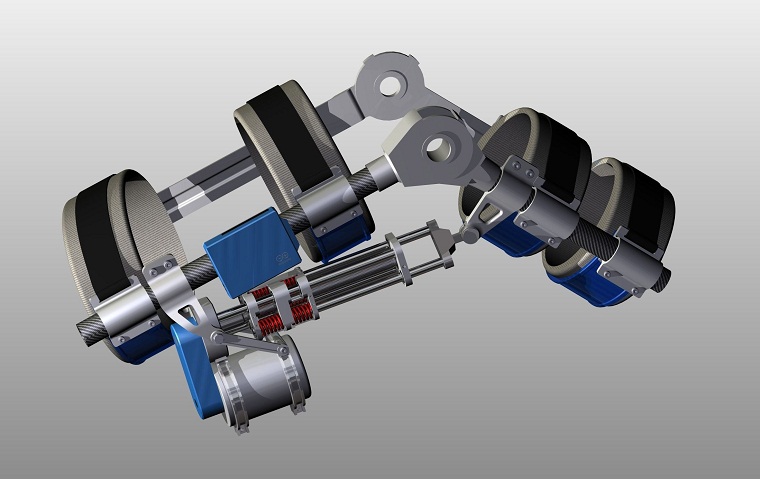
In seguito all’attività di progettazione e dopo le analisi strutturali possiamo affermare che il tutore attuato, configurato tramite l’adozione di entrambe le soluzioni allo snodo del ginocchio, supera le verifiche di resistenza. I vincoli più stringenti da seguire sono stati quelli riguardo al peso complessivo della struttura (che l’azienda ha stimato sui 2,5 kg) e quello riguardo l’ingombro totale. Per quanto riguarda il primo vincolo, il prototipo ha un peso di 2,651 kg. Riguardo il secondo vincolo siamo riusciti a ridurre al minimo gli ingombri restando dentro al range di valori prefissato. Il discriminante tra la soluzione con cerniera semplice e la soluzione alternativa sta nel ciclo tecnologico. La maggiore raffinatezza della soluzione alternativa rende infatti necessarie lavorazioni più complesse che implicano tempi di lavorazione maggiori, tecnologie specifiche e maggiore costo per il cliente finale. In conclusione, per una produzione in serie da indirizzare ad un ampio bacino d’utenza, la soluzione con la cerniera semplice è quella più adatta.
Sviluppi futuri
In futuro si potrebbero apportare delle migliorie volte innanzitutto ad abbassare il peso complessivo della struttura. Tali modifiche potrebbero essere fatte sull’articolazione meccanica del ginocchio, ottimizzandola per raggiungere una massa minore, purtroppo per il momento eccessiva. Successivamente l’attenzione andrebbe posta sul sistema di alimentazione dell’attuatore. La nostra idea era quella di predisporre una batteria agli ioni di litio assicurata nella zona lombare, posteriormente all’individuo. Così facendo il suo peso non andrebbe a scaricarsi sugli arti inferiori. Bisognerebbe infine predisporre un encoder sul carrello dell’attuatore per fornire ad Arduino i dati necessari al controllo dello stesso, ed eventualmente degli accelerometri sulla struttura per lo stesso scopo.