
.png)
Configurazione
Data la cinematica del sistema in questione è stato scelto di utilizzare un
meccanismo di attuazione lineare che lavorasse in compressione mentre il soggetto
effettua la salita. Questo poichè le strutture con cui vengono realizzati gli attuatori e
le trasmissioni resistono meglio in tale configurazione piuttosto che in trazione,
soprattutto dal momento che uno dei requisiti più importanti è stato proprio il peso
limitato del tutore.
Altre soluzioni prese in considerazione inizialmente sono state:
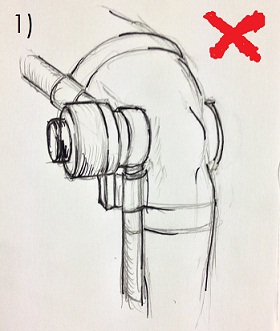
- Sistema di attuazione rotativo direttamente applicato in prossimità
dell’articolazione del ginocchio (1)
Scartata:per garantire la coppia richiesta sarebbe stato necessario introdurre un
ingombro eccessivo concentrato sul ginocchio, che non rispettava i vincoli imposti
da ROADRUNNERFOOT. Tale ingombro era costituito dal motore in primis, e
successivamente dall’aggiunta di rapporti di riduzione dal motore alla struttura,
poichè i servomotori disponibili garantiscono coppie molto basse e giri per minuto
dell’ordine delle migliaia.
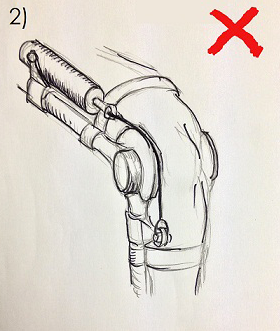
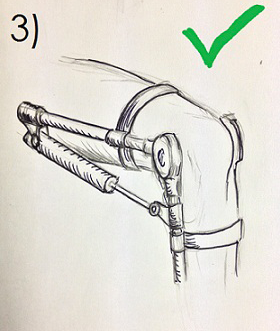
- Sistema di attuazione lineare situata sulla parte superiore della gamba, operante in trazione (2)
Scartata:l’idea di far operare in trazione un attuatore è stata accantonata quasi subito, innanzitutto per la minore resistenza degli elementi strutturali in trazione rispetto alla compressione. Inoltre questa soluzione portava a scaricare delle forza di compressione intense sullo snodo del ginocchio, per non parlare della necessità di realizzare leve importanti sulla parte frontale della gamba per garantire i bracci necessari alle forze.
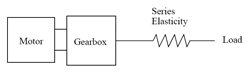
Series Elastic Actuator
I SEA (Series Elastic Actuator) sono degli attuatori lineari con alimentazione elettrica.
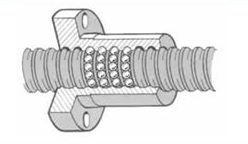
Il moto viene conferito tramite una vite a ricircolo di sfere, che trasforma la
rotazione del motore in una traslazione. Rispetto ad un attuatore lineare classico
questi dispositivi utilizzano un insieme di elementi elastici posti in serie tra il carrello
montato sulla vite e l’output dell’attuatore stesso.
I vantaggi di tale introduzione sono i seguenti:
- Elevato controllo sulla forza di output: l’attuatore si trova ora a dover imporre uno spostamento anziché una forza, che viene convertito in forza dalle molle, facilitando il compito del motore e del sistema di controllo.
- Minore inerzia vista a valle delle trasmissioni: riducendo la rigidezza della trasmissione si fa in modo che la transizione di energia cinetica attraverso il giunto sia più graduale. Poiché si parla di una struttura a contatto con una persona, bisogna attribuire la giusta importanza alla questione rigidezza, poiché in un sistema troppo rigido ogni urto è causa di forze elevate e impulsive.
- Capacità di immagazzinamento energia potenziale negli elementi elastici: in questa maniera l’attuatore dovrà compiere spostamenti maggiori per esercitare la stessa forza di uno completamente rigido.
Per queste e altre ragioni i SEA risultano perfetti in applicazioni quali protesi attive o esoscheletri, dove si predilige la sicurezza in seguito a traumi rispetto alla precisione di posizionamento.

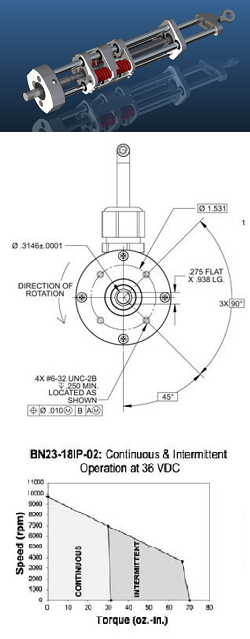
Il SEA proposto
Per il tutore in esame è stato cercato un SEA che soddisfacesse una richiesta di
potenza di picco di 130 W, con forza intermittente di almeno 1115 N, e
un’escursione di 110 mm.
Questo tipo di attuatori impiega motori elettrici brushless DC alimentati a 36 Volt,
che garantiscono basso rumore, longevità, pesi/ingombri molto contenuti e controllo
in posizione e velocità molto alto (garantito da un controller elettronico a banco di
transistor che sostituisce i commutatori a spazzole).
La struttura scelta è costituita da 4 barre lunghe 185 mm di lega di alluminio al silicio e magnesio 6061-T6. Due di queste fungono da guide per il carrello e due come connessione tra il carrello è il punto di collegamento di output dell’attuatore. In questa maniera si ottiene un interasse misurato ai punti di attacco di 210 mm in massima compressione e 315 mm in massimo estensione. Così facendo siamo riusciti a garantire l’escursione necessaria alla distensione della gamba. Il resto della struttura è costituita in lega di alluminio (che garantisce la leggerezza richiesta) e, per alcuni componenti (vite e madrevite) in acciaio.
Infine il motore brushless scelto per lo scopo è il BN23-18IP della Moog Motors , che garantisce le performance richieste.
Attuatori alternativi
Nella scelta dell’attuatore si sono presentate diverse alternative, che però sono state scartate per diversi motivi:
Attuatori oleodinamici: garantiscono forze molto alte, dell’ordine delle decine di kN. Tuttavia si tratta di strutture ingombranti, di peso elevato e prontezza e velocità di estensione che non soddisfacevano i requisiti. Inoltre necessitano di un sistema di movimentazione del fluido esterno, anch’esso ingombrante e pesante.

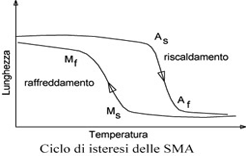
Attuatori con materiali a memoria di forma: i materiali a memoria di forma possono essere utilizzati per effettuare un moto (se collegati ad un elemento elastico) tramite l’impiego di una fonte di calore, che ne varia le caratteristiche cristalline. Non è stato possibile però progettare un sistema di questo tipo che garantisse velocità di estensione dell’ordine della decina di centimetri al secondo e che fornisse forze di 1000 N. Inoltre una fonte di calore con questo scopo tende a consumare molta energia rispetto ad un motore elettrico classico, a parità di prestazioni dinamiche.
Attuatori lineari semplici: sono quelli che più si avvicinano alle caratteristiche dei SEA. Utilizzano un motore elettrico per movimentare un albero filettato, da cui il moto è trasmesso ad un pistone tramite un sistema vite-madrevite. Rispetto ai SEA però non presentano elementi elastici in serie, costituendo un sistema eccessivamente rigido per le nostre esigenze.
