Politecnico di Milano - Corso di Laurea in Ingegneria Meccanica
Laboratorio Progettuale di Disegno Assistito dal Calcolatore
| Home | Formula SAE | Teoria sul sistema 4WS | Modellazione 3D dei componenti | Cinematica | Analisi FEM |
|
|
Politecnico di Milano - Corso di Laurea in Ingegneria MeccanicaLaboratorio Progettuale di Disegno Assistito dal Calcolatore |
|||||
|
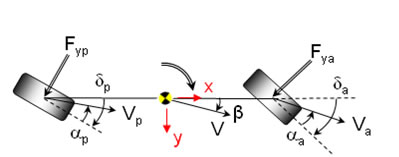
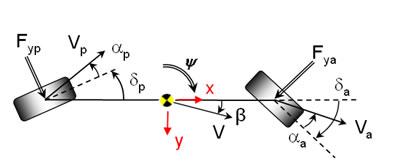
Il moto di un veicolo è strettamente legato alla distribuzione delle forze di contatto scambiate tra pneumatici e superficie stradale. In curva le forze laterali dipendono soprattutto dagli angoli di deriva, oltre ad essere influenzate dal carico verticale, dall’angolo di camber e dalla forza longitudinale (forza di trazione o frenante).
Generalmente per un’ automobile solamente le ruote anteriori sono coinvolte nel controllare l’angolo d’assetto necessario per effettuare una curva. Le ruote posteriori sviluppano forze trasversali solo in conseguenza a tale angolo d’assetto, per stabilizzare il retrotreno; esse sono quindi coinvolte direttamente nel controllo del moto.
Da questa osservazione si può intuire che sterzando anche le ruote posteriori in modo opportuno, è possibile modificare la dinamica laterale del veicolo in modo che sia in grado di cambiare direzione nel modo più rapido possibile. Introducendo un ulteriore grado di libertà su cui agire, è possibile inoltre modificare l’handling della vettura secondo gli obiettivi desiderati.
Due condizioni di marcia diventano quindi possibili: con ruote sterzanti in fase e controfase.
Alle basse velocità si pone l’obiettivo di ridurre gli spazi di manovra e rendere la vettura più agile, mentre alle alte velocità si ricerca la stabilità del veicolo e la guidabilità.
Questi risultati si ottengono governando la sterzatura delle ruote posteriori rispettivamente. in controfase e in fase.
In questo modo infatti si controlla l’angolo di deriva posteriore senza dover incrementare l’angolo d’imbardata e di conseguenza la velocità d’imbardata dell’intero veicolo.
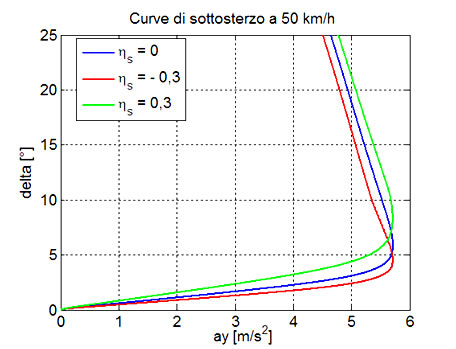
Sterzatura posteriore in fase:
Maggiore tendenza al sottosterzo
Accelerazione laterale maggiore per angoli di sterzo elevati
Sterzatura posteriore in controfase:
Minore tendenza al sottosterzo
Accelerazione laterale minore per angoli di sterzo elevati
Perché adottare il sistema 4WS a bordo di una vettura da competizione.
L’applicazione di un sistema di sterzatura integrale ad una vettura da competizione è studiato per aumentare le prestazioni del veicolo. Gli obiettivi che si pone una logica di controllo applicata in tale ambito sono in particolare:
Schema di funzionamento del sistema di sterzatura integrale.
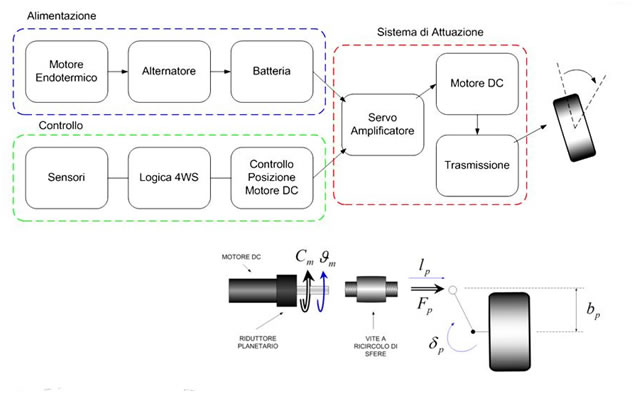
Layout del sistema 4WS a bordo vettura.
Il sistema di attuazione elettromeccanico è composto da un motore DC a magneti permanenti, alimentato attraverso un servoamplificatore PWM, mentre il sistema di trasmissione si occupa di trasferire il moto alle ruote posteriori. Il sistema di alimentazione non viene modificato, si utilizzano i 12V della batteria.
La parte di controllo comprende l’acquisizione dei segnali, la logica 4WS e il controllo di posizione del motore DC.
Sistema di attuazione: