SISTEMA DI MOVIMENTAZIONE PER PANNELLI DI LEGNO
![]()
|
|
SISTEMA DI MOVIMENTAZIONE PER PANNELLI DI LEGNO |
|
| OBIETTIVI |
| MATERIALE A DISPOSIZIONE |
Analisi cinematica del robot:
E' stato necessario eseguire uno studio sulla cinematica del manipolatore così da poter valutare gli incombri che lo stesso avrebbe necessitato durante il moto di carico e scarico dei pannelli.
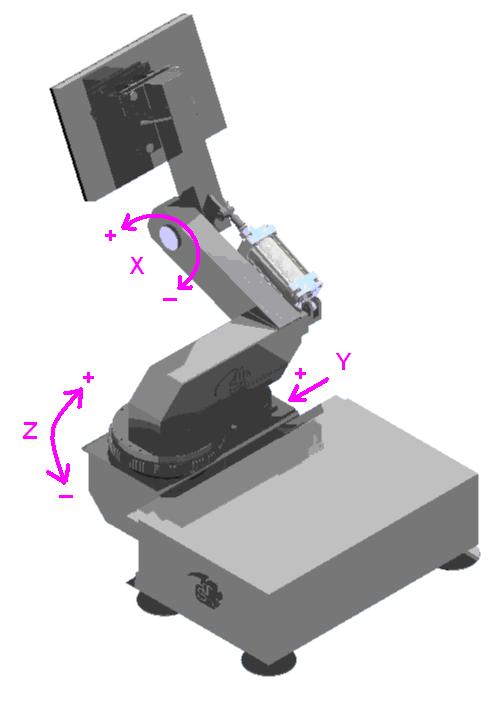
I parametri presi in esame sono quelli relativi ai tre gradi di libertà del robot:
- traslazione parallela alla rulliera di scarico della macchina di finitura per poter inseguire e afferrare i pannelli uscenti dalla stessa
- rotazione di 180° sull'asse verticale così da poter riporre i pannelli sul nastro trasportatore
- traslazione del sistema di presa affinchè lo stesso possa venire in contatto con i pannelli
Si riporta qui di seguito un immagine del manipolatore con evidenziati i tre gradi di libertà appena discussi.
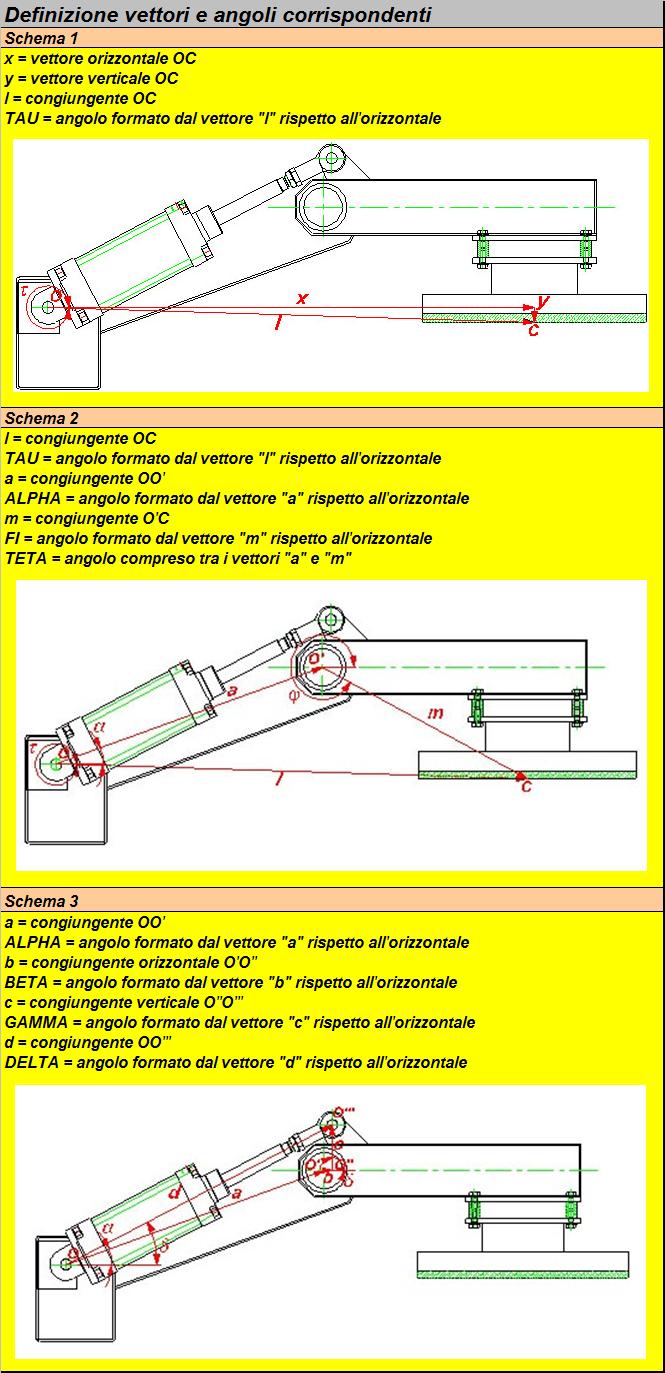
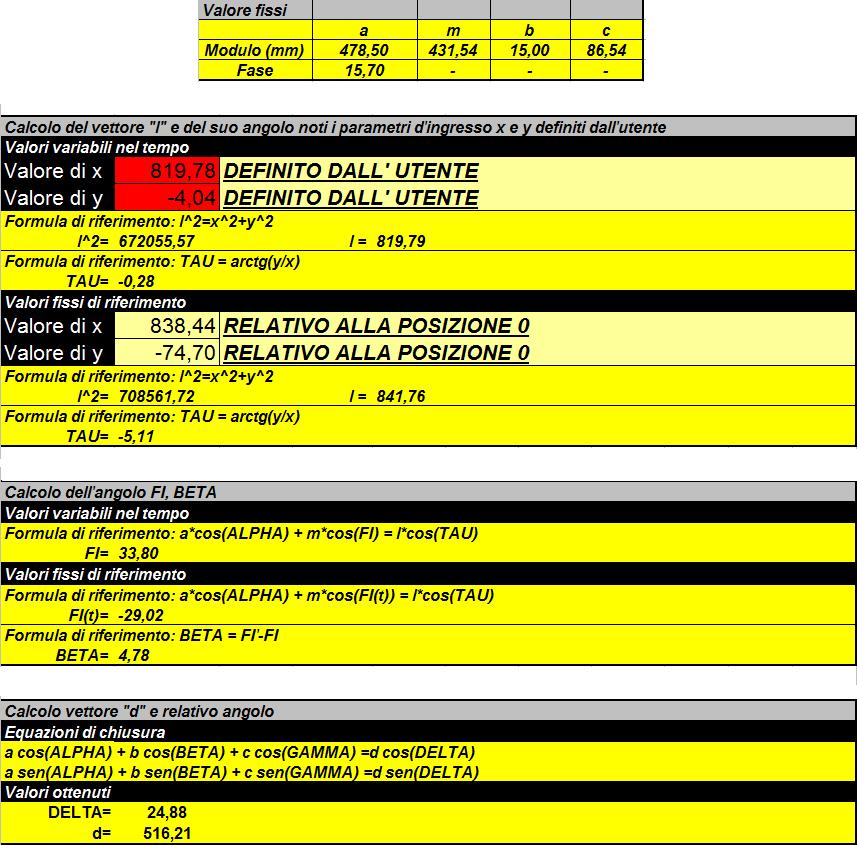
L'analisi cinematica è stata incentrata sulle posizioni angolari e le traslazioni rese disponibili dal macchinario.Tramite la scrittura di diverse equazioni di chiusura, qui di seguito rappresentate in tre schemi, si è risaliti ai valori delle variabili X, Y e Z corrispondenti alle posizioni di carico, scarico e tutte quelle di transizione tra i due estremi.
Le dimensioni geometriche del manipolatore rientrano nell'equazioni di chiusura sia sotto forma di valori costanti che di valori variabili nel tempo, i gradi di liberà. In particolare la rotazione X, tra sistema di presa e braccio del robot, dipende dai valori di estensione dell'attuatore idraulico.