A quali richieste il committente non poteva rinunciare?
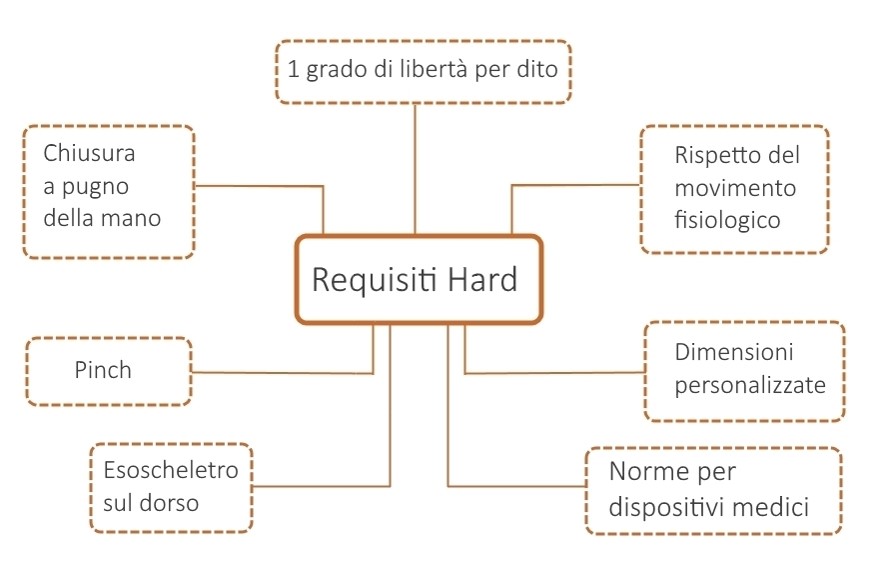
Requisiti Hard
Un requisito preliminare per un esoscheletro riabilitativo riguarda le norme da rispettare: si tratta infatti di un dispositivo medico non impiantabile di classe IIA, dispositivo terapeutico destinato a rilasciare energia al corpo umano. I requisiti fondamentali indicati dal committente riguardano fondamentalmente la natura della riabilitazione. È stato infatti richiesto che la mano potesse essere riabilitata in modo da ottenere una chiusura a pugno quasi completa. A tale esigenza è fortemente collegata la necessità di porre l’esoscheletro di riabilitazione sul dorso della mano in modo da permettere l’eventuale presa di oggetti fisici, tipico esercizio riabilitativo. Inoltre è stato richiesto un esoscheletro che permettesse il "pinch", chiusura pollice-indice, per oggetti di dimensioni ridotte. È stata posta attenzione sulla chiusura fisiologica della mano in quanto, per una corretta riabilitazione, è necessario che prima inizi a ruotare la falange e solo successivamente la falangina e la falangetta. Essendo le mani dei pazienti dimensionalmente differenti è necessario progettare un esoscheletro per ogni caso in esame; da qui la necessità di un prototipo parametrizzato sulle sole lunghezze delle falangi di ogni dito. Infine per ridurre l’ingombro e i costi è stato richiesto di movimentare l’esoscheletro con un solo grado di libertà per dito, mantenendone comunque l’indipendenza.
Il gruppo ha inoltre rilevato alcuni desideri del committente
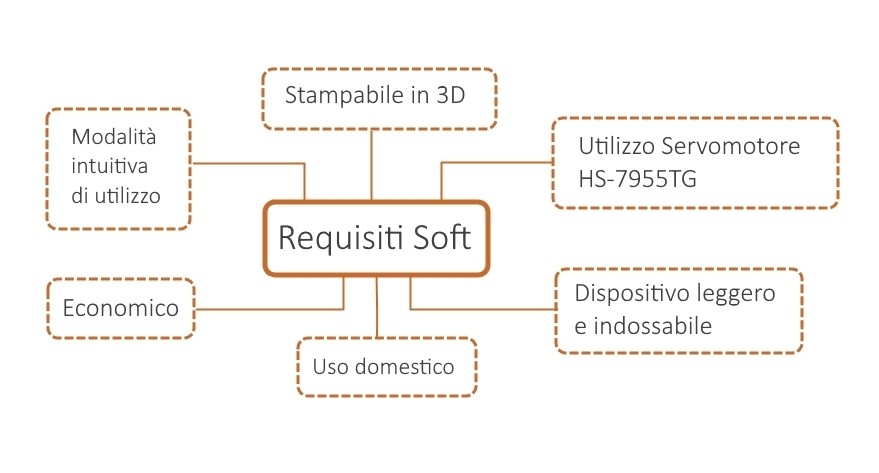
Requisiti Soft
Da un confronto con l’Ing. Mario Covarrubias sono emersi alcuni requisiti non necessari per la riabilitazione ma desiderabili per la produzione. Innanzitutto è stato richiesto che il prototipo venisse stampato in 3D e che quindi il materiale di produzione dovesse essere adatto alla prototipazione rapida. Tale richiesta è legata al desiderio di avere costi e tempi di sviluppo contenuti.
Inoltre, data la bassa densità del materiale plastico (𝜌=1.3∙10^3 [𝑘𝑔/𝑚^3]), l’esoscheletro risulta leggero e poco ingombrante. Riguardo il sistema attuativo il Dipartimento di Ingegneria Meccanica del Politecnico di Milano ha richiesto l’utilizzo di servomotori HS-7955TG in quanto già disponibili. Il committente ha inoltre richiesto di porre attenzione all’ingombro e all’interfaccia dell’esoscheletro affinché quest’ultimo possa essere utilizzato anche per una riabilitazione domestica.Diagramma di Gantt
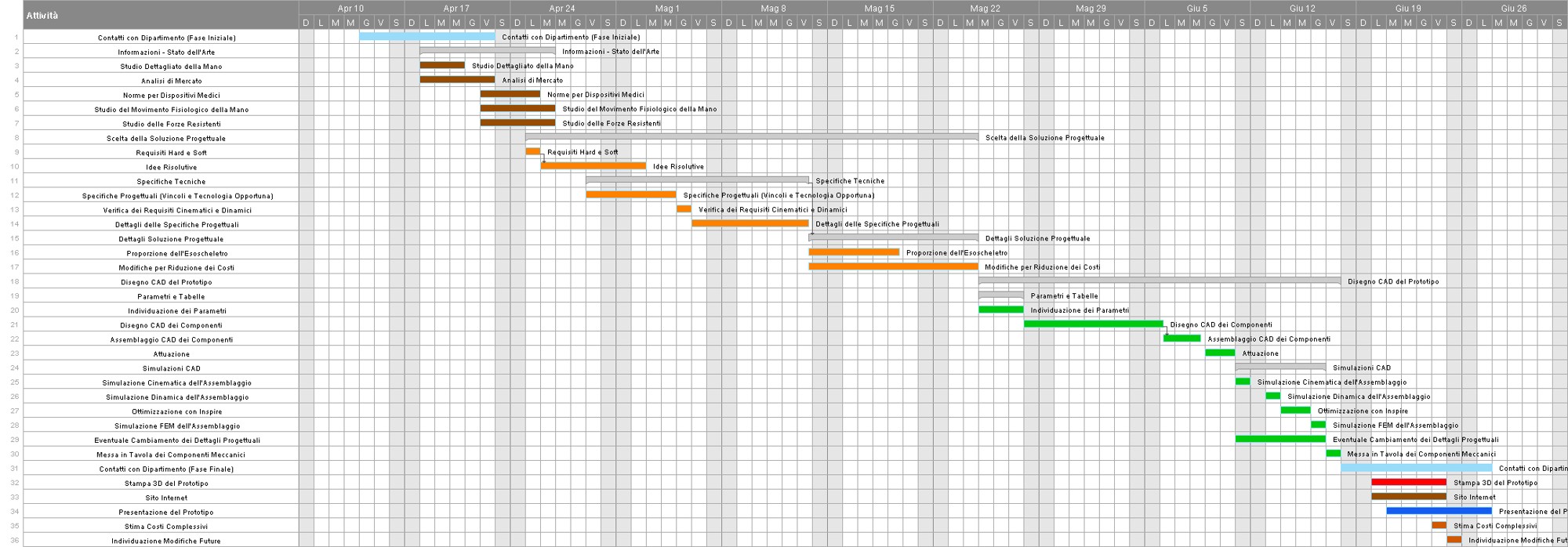
Dai requisiti all’organizzazione
Per le tempistiche riguardanti l’organizzazione del progetto si è utilizzato un diagramma di Gantt riportante le principali attività del lavoro svolto.