OTTIMIZZAZIONE DEI RISULTATI
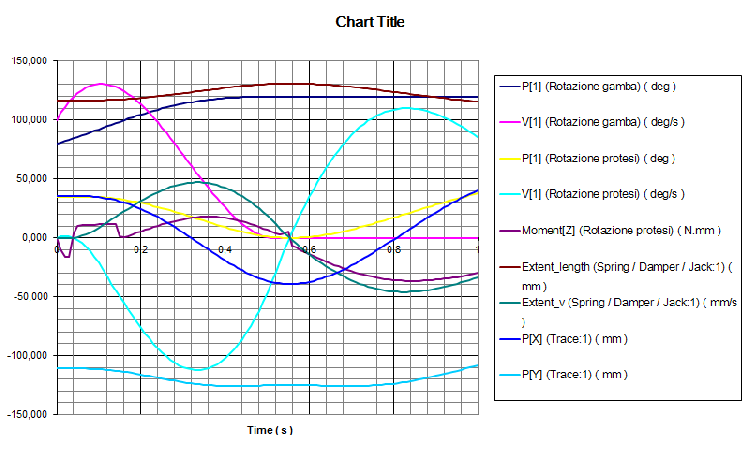
Per eliminare la discontinuità precedentemente evidenziata, abbiamo imposto come parametro di simulazione il valore di damping di contrazione (13 [N*s/mm]) quando la velocità di rotazione relativa del ginocchio è positiva, il valore di damping di estensione (0.8 [N*s/mm]) quando è negativa. Dai grafici risultanti riscontriamo la correttezza della modifica: la discontinuità è venuta meno (vedi grafico linea azzurra sotto riportato).
In questa simulazione inoltre abbiamo aggiunto sul perno del ginocchio un coefficiente di attrito pari a 0.1 agente su un raggio di 7,5 [mm], al fine di eliminare un’altra approssimazione semplificativa e poterci avvicinare ulteriormente al caso reale (nei limiti del moto imposto alla gamba, approssimato secondo i dati ricavati). A fine simulazione la rotazione relativa della protesi è di soli 0,37°, la gamba arriva a fine corsa un istante dopo con una velocità angolare di circa 15 [°/s], del tutto accettabile (0.26 [rad/s], con un braccio di 35 [mm], il che comporta una velocità lineare di impatto di 0.0091 [m/s]).
Nota: il momento in questo caso risulta essere diverso da 0, ma ciò è coerente con la presenza dell’attrito. Come conferma della correttezza della generazione di tale momento, notiamo che il suo segno è opposto a quello della velocità di rotazione relativa della protesi.
Dato che la rotazione della gamba (oggetto della nostra analisi) si arresta a 0,528 [s], cioè prima della fine della simulazione (1 [s]), rileviamo una divergenza nella curva rappresentante la posizione relativa della protesi. Questo perchè la protesi tende a raddrizzarsi per effetto della gravità.
© Belà, Valli, Valsecchi, Vezzoli
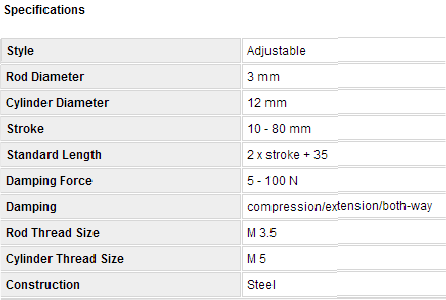
SMORZATORE ALTERNATIVO
Terminata la fase d’analisi, abbiamo infine cercato tra gli smorzatori in commercio
quello avente caratteristiche corrispondenti al nostro studio. Avendo come limiti
non solo i valori di smorzamento, ma anche le dimensioni del cilindro-