© Belà, Valli, Valsecchi, Vezzoli
1^ FASE DI ANALISI
APPROSSIMAZIONE DEL DAMPING COEFFICIENT r
Non avendo idea dei valori di smorzamento che avrebbe potuto avere il pistone in questione, abbiamo pensato di svolgere un’analisi imponendo il moto ad entrambi i gdl del sistema (rotazione della gamba e della protesi) e posizionando uno smorzatore con coefficiente r pari a 0, al fine di ricavare i valori di velocità di estensione dello smorzatore. Ipotizzando i moti che avrebbero potuto seguire gamba e protesi, abbiamo quindi fatto partire la simulazione in Inventor richiedendo come output la coppia sull’albero necessaria a muovere la protesi in quel modo e la extention speed dello smorzatore “fittizio” (avente r=0).
Elaborazione dei dati (tramite excel)
Sapendo che la coppia in questione, nella condizione di funzionamento normale, è generata dallo smorzatore, abbiamo quindi ricavato attraverso una serie di legami geometrici il braccio della forza dissipativa. Abbiamo quindi calcolato i coefficienti di smorzamento da imporre punto per punto al ginocchio per poter ottenere il moto desiderato:
Calcolati così i valori di r in modo puntuale, abbiamo poi stimato il valore effettivo per ciascuna delle due fasi di funzionamento, tramite media nei periodi delle rispettive fasi. Nella prima fase del movimento, la velocità di rotazione della gamba parte già diversa da zero, in quanto la sua estensione è iniziata prima dell'istante di inizio della nostra analisi, mentre la velocità di rotazione relativa della protesi è pari a 0: questo perchè la protesi stessa, nella fase immediatamente precedente alla nostra analisi, è in fase di contrazione. Il suo moto quindi comincia nell’istante stesso di inizio analisi. Durante questa prima fase, date le condizioni iniziali adottate, la protesi è soggetta ad una forza di inerzia che tende a farla chiudere: il pistone si contrae. Andrà quindi applicato al pistone un coefficiente di smorzamento proprio della sua contrazione.
2^ SECONDA FASE DI ANALISI
IMPOSIZIONE DI r, VERIFICA DEL MOTO
Abbiamo a questo punto svolto una simulazione dinamica inversa rispetto alla precedente, caratterizzando lo smorzatore con i valori di r calcolati. Il moto così ottenuto è risultato conforme a quello imposto nell’analisi precedente, verificando così la correttezza di risposta del ginocchio.
CONDIZIONI DI STUDIO:
Abbiamo quindi fatto le verifiche sopra descritte con dati realistici per un paziente:
-
-
-
-
-
-
RISULTATI:
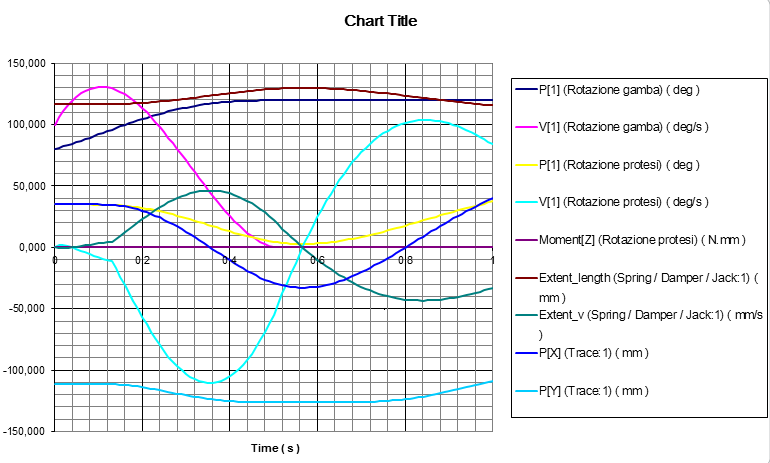
La rotazione relativa del ginocchio rispetto alla gamba alla fine del tempo di analisi è di 4.5°, ma considerando che l’estensione completa della gamba si raggiunge esattamente con l’appoggio della protesi, lasciando estendere il ginocchio per, approssimativamente, altri 5 centesimi di secondo, otteniamo una rotazione relativa minima di 2.81°. Dopodiché, poiché il tempo della simulazione in Inventor è di 1 [s], si può vedere che il ginocchio riprende a contrarsi per effetto della forza di gravità. Si nota inoltre una piccola discontinuità nella risposta del ginocchio, presente anche nelle precedenti analisi dello stesso tipo, dovuta al fatto che facciamo variare il valore di smorzamento leggermente in ritardo rispetto al dovuto.
Nota: la rotazione della protesi inizia a diminuire dopo 4 centesimi di secondo (contrazione) mentre, come risulta evidente dalla discontinuità (curva ‘V(rotazione protesi)’) nel grafico sopra riportato, lo smorzamento viene fatto cambiare dopo 13 centesimi di secondo. Tale ritardo è probabilmente dato dal fatto che stiamo utilizzando un coefficiente di smorzamento pari a 13, e non 12.6 come risultante dalla parte di stima del coefficiente.