


HOME AZIENDA SPECIFICHE DI
PROGETTO APPROCCIO CALCOLO SFORZI CONCLUSIONI
RINGRAZIAMENTI
·
MATERIALE UTILIZZATO
Il materiale
utilizzato per la parte superiore, pezzo tibia, perno molle e perni guide è:
ALLUMINIO 7178 T6
·
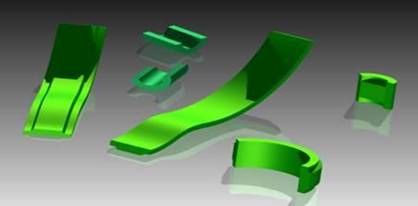
GUIDE
Le guide,
come già detto, sono state costruite manualmente, modificandole passo-passo in
modo di adattare il CIR alla traiettoria cercata. In questo modo l’andamento
del centro di istantanea rotazione è quanto più possibile simile a quello di un
ginocchio sano.
Si è usato
come software il programma Catia, che consentiva un disegno più preciso, e poi
sono state importate in Inventor, che d’altra parte rende più facile
l’assemblaggio finale.
·
PEZZO SUPERIORE
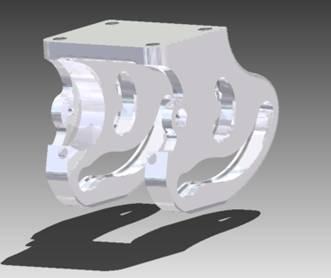 Una volta nota la forma delle guide
si è costruito il pezzo che le contiene, modificandolo man mano per adattarlo
alle varie esigenze. Le alette laterali sono state dimensionate in base al metodo
della sezione minima, ovvero calcolando prima la dimensione minima che avrebbe
dovuto avere la sezione per sopportare gli sforzi, e poi mantenendo quel valore
minimo per ogni sezione del pezzo. Tutto questo per diminuire i volumi, quindi
i pesi.
Una volta nota la forma delle guide
si è costruito il pezzo che le contiene, modificandolo man mano per adattarlo
alle varie esigenze. Le alette laterali sono state dimensionate in base al metodo
della sezione minima, ovvero calcolando prima la dimensione minima che avrebbe
dovuto avere la sezione per sopportare gli sforzi, e poi mantenendo quel valore
minimo per ogni sezione del pezzo. Tutto questo per diminuire i volumi, quindi
i pesi.
Nelle scanalature che costituiscono le guide sono stati
ricavati degli alloggiamenti per favorire l’incastro delle plastiche anti usura
su cui poi andranno a scorrere i perni.
Nella parte frontale invece sono state realizzate le
estrusioni dove poi si andrà a posizionare il gruppo molla, e per ultimo sono
stati realizzati i fori per viti e rondelle.
Nella parte superiore verrà fissato l’attacco centrato, che serve a collegare
la protesi al moncone.
·
PLASTICHE
E MATERIALI ANTIURTO
Le plastiche
devono essere fatte su commessa di un materiale duro, per resistere agli
sforzi, e poco resistente agli attriti. Per questo motivo si è scelto un
materiale di tipo poliammide.
Gli antiurti
invece sono fatti di un materiale di gomma.
·
PARTE TIBIA
 Il secondo pezzo più importante
della protesi è la parte che verrà poi collegata alla tibia. Esso termina con
una attacco preciso, di dimensioni standard, che serve proprio per il
collegamento. Nei due fori verranno posizionati i perni, e dal momento che non
devono essere solidali con la parte tibia, si è pensato di inserire delle
boccole per favorire lo strusciamento relativo.
Il secondo pezzo più importante
della protesi è la parte che verrà poi collegata alla tibia. Esso termina con
una attacco preciso, di dimensioni standard, che serve proprio per il
collegamento. Nei due fori verranno posizionati i perni, e dal momento che non
devono essere solidali con la parte tibia, si è pensato di inserire delle
boccole per favorire lo strusciamento relativo.
·
PERNI
 I perni sono anch’essi pezzi
standard, ed è a loro che è affidato tutto il movimento, quindi il buon
funzionamento della protesi.
I perni sono anch’essi pezzi
standard, ed è a loro che è affidato tutto il movimento, quindi il buon
funzionamento della protesi.
Inizialmente
erano stati dimensionati con un diametro di 8 mm, successivamente diminuito a 6
mm. In questo modo riescono a sopportare
un peso statico di circa 400 kg, quindi più che sufficiente per sostenere il
peso di una persona.
I due intagli
presenti servono per posizionare gli anelli antiscorrimento, che impediscono lo
spostamento della parte tibia in direzione assiale, mentre i due fori filettati
alle estremità servono per le viti che impediscono ai perni stessi di uscire
dalle proprie sedi.
·
GRUPPO
PROPULSIVO (MOLLA)
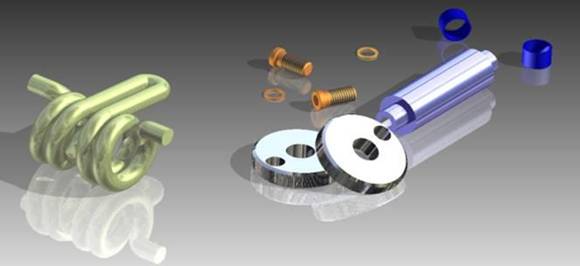 Il sistema propulsivo è stato un
altro punto chiave del progetto. Esso ha infatti il compito di richiamare la
parte tibia nella posizione di gamba tesa durante la fase di swing, ovvero
quando il piede che ha compiuto un passo si stacca da terra. In un arto sano
questo movimento è affidato ai muscoli quadricipiti, un paziente amputato
invece non ha queste forze a disposizione.
Il sistema propulsivo è stato un
altro punto chiave del progetto. Esso ha infatti il compito di richiamare la
parte tibia nella posizione di gamba tesa durante la fase di swing, ovvero
quando il piede che ha compiuto un passo si stacca da terra. In un arto sano
questo movimento è affidato ai muscoli quadricipiti, un paziente amputato
invece non ha queste forze a disposizione.
Per
garantirne il funzionamento, il gruppo propulsivo deve essere tale da non
esercitare forze all’inizio del passo, in quanto il peso proprio del paziente è
sufficiente a vincere le reazioni vincolari del terreno.
Con il
proseguire del passo invece il sistema deve caricarsi, arrivando alla fase di swing
in modo da garantire un momento di almeno 100 Nm, che permette di compiere uno
swing come quello naturale.
Infine, il
sistema deve disaccoppiarsi dal resto della protesi in fase di seduta, questo
per evitare che la gamba venga spinta in avanti quando il paziente è seduto.
Tutte queste specifiche sono state soddisfatte dal sistema da noi concepito,
che si basa principalmente su una molla torsionale, fissata assialmente al
pezzo superiore, e appoggiata alla parte tibia. In questo modo la molla viene caricata
in fase di camminata e rilascia la propria energia in fase di swing.
Un corretto
dimensionamento di quest’ultima rende possibile il disaccoppiamento
molla-tibia. Infatti la forza esercitata dall’elemento elastico si scarica
quasi interamente sul perno superiore, quello che poi andrà a costituire la
cerniera in fase di seduta. La molla quindi, nonostante sia carica e collegata
alla tibia, non è in grado di generare momento.
È stato
inoltre previsto un sistema di regolazione, basato su una vite senza fine, per
regolare il precarico statico della molla. Questo permette una migliore
adattabilità della protesi a diversi tipi di paziente.
DETTAGLI
DI OGNI COMPONENTE (link attivo nella versione integrale del sito)