 | |
| .:Home:. .:Modellizzazione del problema:. .:Giunti:. .:Modellazione della struttura:. .:Analisi FEM:. .:Rendering:. .:Credits:. .:Bibliografia:. | |
|
ANALISI FUNZIONALE Il braccio robot Schiavi fa parte di un centro di lavoro automatizzato, realizzato per aumentare la produttività incrementando la velocità di abbassamento della ghigliottina della pressa piegatrice. Infatti secondo la norma sulla Sicurezza EN 12622 per tutelare il lavoratore si deve ridurre la velocità della pressa-piegatrice. Rendendo automatizzato il posizionamento delle lamiere nella macchina, si puó lavorare a maggiori regimi. Scopo del braccio è la movimentazione dal deposito lastre alla macchina piegatrice di lamiere il cui ingombro massimo è 1.25 m X 1.25 m e la cui massa massima è di 150 Kg. Si tratta di un sistema a 5 gradi di libertà : due lineari (assicurati da delle guide) e tre rotanti:
 (fig. 1,1 robot a 5 gdl esistente) Queste rotazioni sono consentite da tre motori elettrici caratterizzati da una coppia nominale di 21 Nm a 3000 giri/minuto,mentre la movimentazione del polso avviene attraverso l'utilizzo di un sistema a cinghia dentata che trova spazio all'interno del braccio stesso. (fig. 1,2 1,3 1,4 illustrano l'assemblato del braccio e la trasmissione a cinghia) 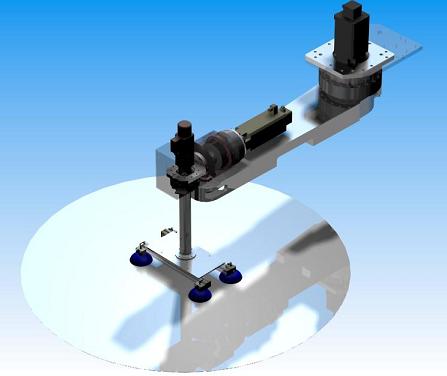 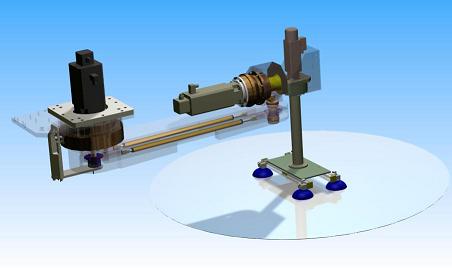 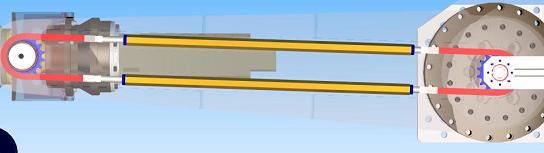 Dal punto di vista strutturale, il braccio deve mantenere una deformazione minima per evitare che la lastra esca dalla posizione prefissata e, quindi, non consenta la corretta realizzazione del piegato. OBIETTIVI E VINCOLI Si propone di realizzare un braccio in cui la trasmissione del moto del polso non sia più realizzata attraverso cinghia dentata, ma attraverso alberi dotati di giunti cardanici. Questo perché si vuole rafforzare la cinematica del sistema ed evitare possibili slittamenti o imprecisioni di posizionamento dovuti ad arresti improvvisi del braccio. Analizzando infatti nel dettaglio i pro e i contro di tale scelta, si ha: ASPETTI NEGATIVI
ASPETTI POSITIVI:
Gli unici vincoli imposti riguardano l'interasse del braccio, il tipo di attacchi braccio/base e braccio/polso e la deformazione massima della struttura del braccio. In questo progetto, quindi, si indagherà per cercare una possibile soluzione del problema utilizzando come programma di modellazione 3D Solid Edge e come programma di Analisi agli Elementi Finiti Algor. |
|
| Inizio Pagina | |
| © 2008 - Progetto a cura di Paolo Magnoni, Lorenzo Penati, Davide Pozzi e Silvio Rabbolini - Laboratorio Progettuale di Disegno Assistito dal Calcolatore | |