Kinematics
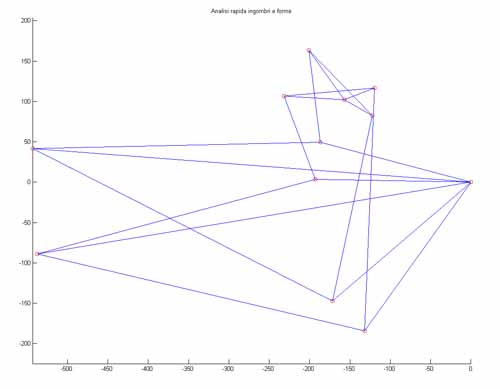
As a first approach we draw a sketch in Catia that schematized the layout of the motorbike, than we looked for a set of measure for the rods that allowed us to stay in the imposed constraints.
As a result we obtained a configuration in which the length of the push rod was 81 mm, unfortunately this length was too short and was in conflict with the length of the thread of the uniballs.
We searched for another configuration with a longer rod and we found it:
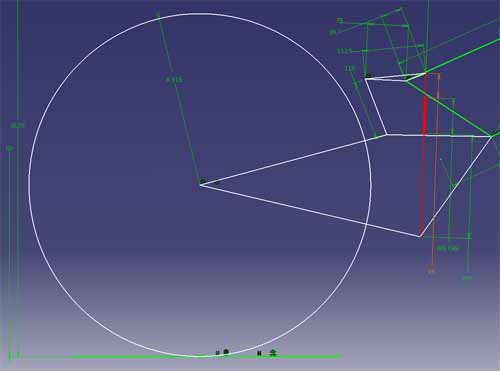
Equilibrium position sketch
Equilibrium and max compression positions
After having found the right configuration we used a Matlab script (Alemoto’s staff gave it to us but it was created for a simpler configuration so we had to modify it to reflect the new geometry of the suspension) to refine the measure of the rods in order to have a compression ratio nearest to the one they asked.
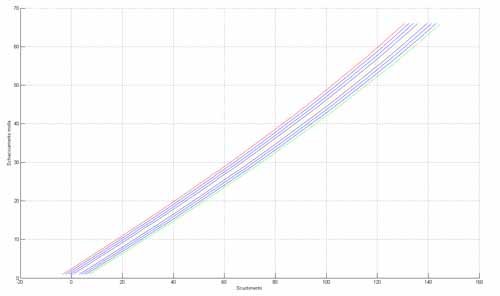
Law of motion, motion of the swing arm vs compression of the spring
Finally we checked that all the constraints were respected:
The “relaxed” shock absorber was 305 mm long and its compression with a movement of the wheel of 120 mm is 55.33 mm (< 70 mm).
With the Matlab plot we can see how the ratio 2.1 : 1 is more or less stable for every length of the rod (from 110 to 119 mm) and from the sketch in Catia we can see how for a 9 mm increase of length of the push rod the sitting position increases of 12.3 mm