


Risultati
La funzione messa a punto in MATLAB fornisce come output un vettore contenete i parametri di spostamento da assegnare ai giunti dei due Haptic Masters. Il movimento del sistema verrà simulato attraverso il programma CATIA. Il segno degli angoli è stato modificato per adattarlo alle convenzioni di CATIA.
Output della funzione in MATLAB (esempio):
>> [R,C] = invTOT(397.5 , 190 , 1048 ,0,0,0)
| C = zeros(5,1); C(1,1) = theta1DEG*(-1);C(2,1) = THETA2DEG*(-1); C(3,1) = d2 - 33; C(4,1) = D3 - 33; C(5,1) = d3; C(6,1) = D4; C(7,1) = alphaDEG; |
C = -23.7742 13.0315 179.9944 185.0124 399.3928 408.0090 0.0100
|
Per ulteriori approfondimenti sui formati di output scelti per la funzione in MATLAB si rimanda all'esposizione del progetto.
Ora tali risultati possono essere utilizzati nel modulo DMU Kinematics di
CATIA:
tali risultati possono essere utilizzati nel modulo DMU Kinematics di
CATIA:
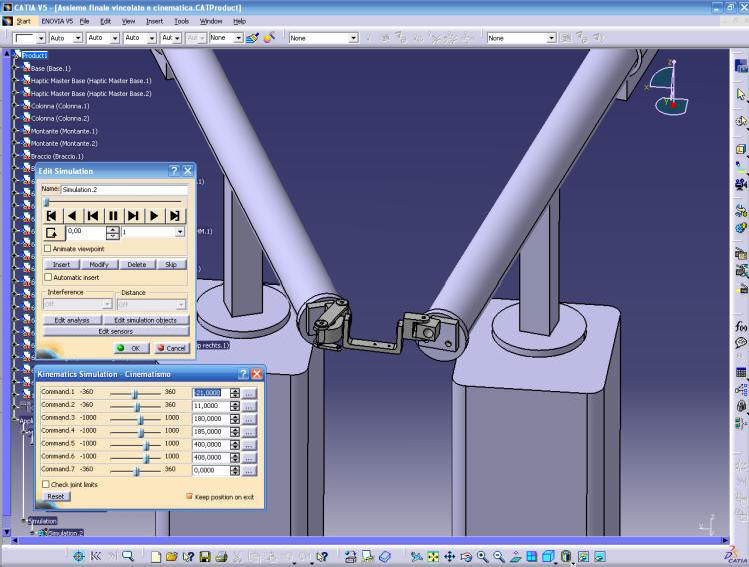
Questi risultati saranno mostrati in tempo reale sia
con MATLAB che con CATIA durante la presentazione.
