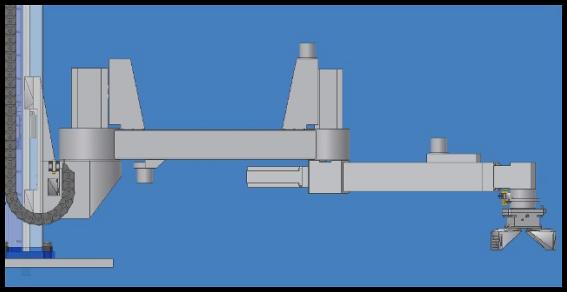
Il
lavoro è consistito nel riprodurre i componenti del robot grazie al software di
sviluppo Autodesk Inventor e in seguito nell'assemblare ogni pezzo fino alla
realizzazione del Robot e alla simulazione dinamica della movimentazione.
In
seguito ne abbiamo calcolato la portata utile, in base al peso della struttura
sospesa e al massimo momento resistente che è possibile applicare alle guide
montate sulla struttura portante.
Il
carico massimo manipolabile è risultato essere circa 58 Kg.
E’
stata inoltre realizzata una variante dotata di minore corsa di funzionamento,
operando una riduzione di lunghezza dei bracci del robot, opportunamente parametrizzati.
Infine
ci siamo dedicati alla ricerca di soluzioni alternative che potessero portare
ad un aumento del carico manipolabile, con l’adozione di un cilindro
pneumatico, e ad una maggiore versatilità della macchina, grazie all’adozione
di una testa rotante dotata di 2 diversi organi di presa.