In accordo con gli ingegneri della ATEC s.r.l., società
committente del lavoro, abbiamo prodotto una modellizzazione 3D di un
manipolatore industriale SCARA.
La macchina è composta da un basamento lungo il quale trasla
verticalmente un carrello, il cui movimento viene attuato da una vite a
ricircolo di sfere.
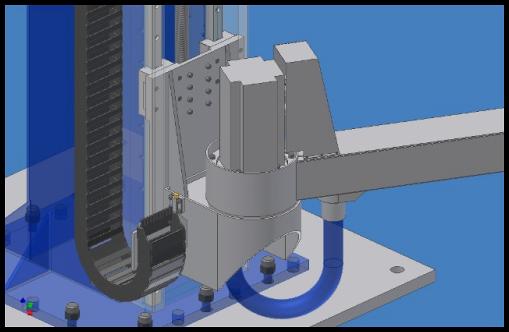
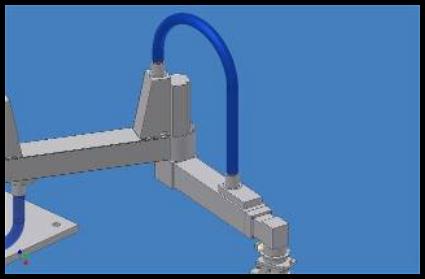
Sul carrello è montato un primo braccio, che può ruotare
attorno al proprio asse di 180°.
All’estremità vi è poi un secondo braccio, anch’esso dotato di
corsa pari a 180°.
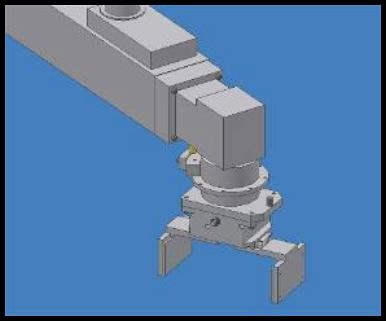
All’estremità, infine, il modello base propone una testa che
può ruotare intorno al proprio asse verticale, sulla quale è posizionato un
organo di presa ad azionamento pneumatico.
Caratteristica particolare del robot preso in esame sono le
dimensioni, più elevate rispetto a quelle medie di altri modelli in commercio.
Il conseguente elevato peso della struttura sospesa ha
comportato l’adozione di soluzioni particolari per ottenere un elevato livello
di precisione di funzionamento e di portata utile.