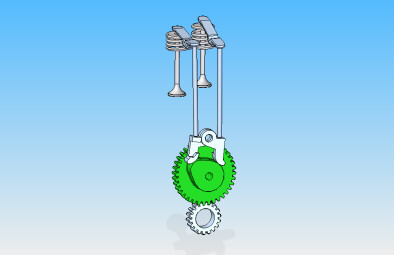
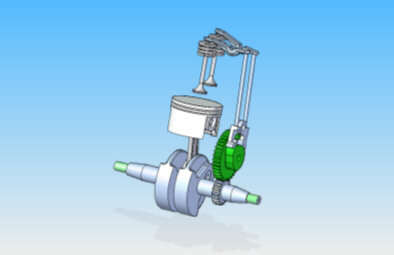
Come risultato del nostro lavoro ecco la realizzazione dell'insieme del motore McCulloch utilizzato dal prototipo Why Not durante le edizioni 2005 e 2006 della competizione di Shell Eco-Marathon.
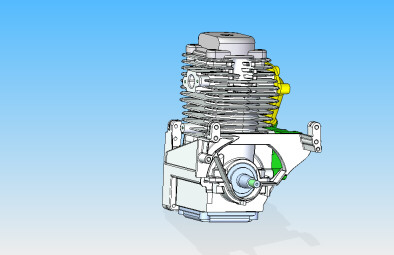
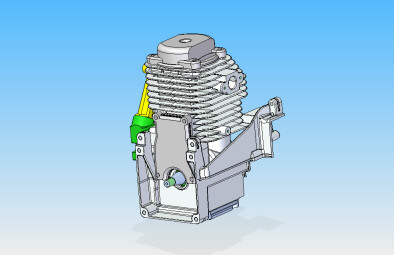
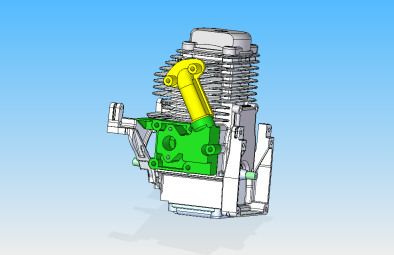
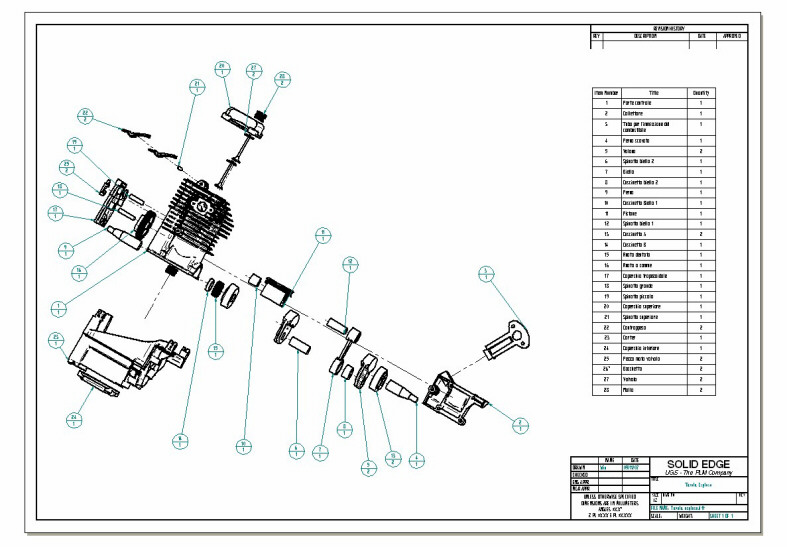
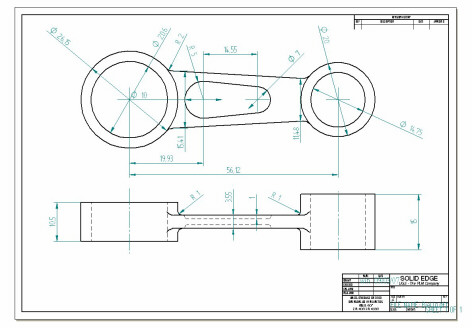
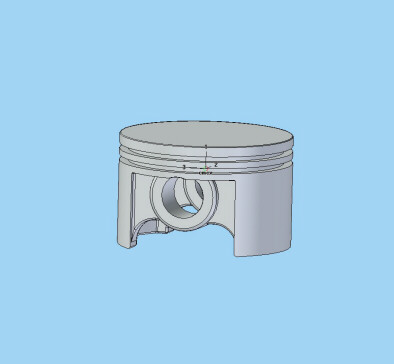
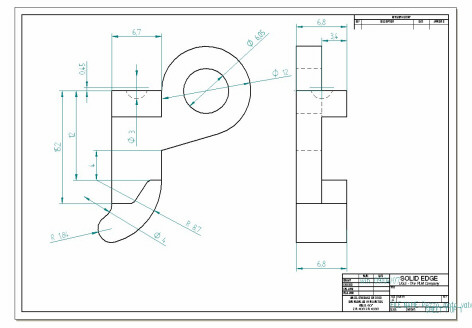
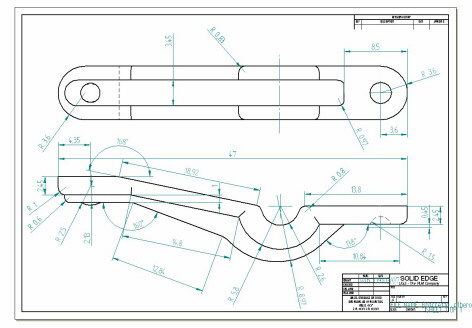
Riportiamo di seguito l'elenco in dettaglio delle parti che compongono l'assieme. Esse come l'assieme sono state modellate utilizzando il software di modellazione solida Solid Edge V18. Ad ogni parte si allega la relativa messa in tavola.
Biella

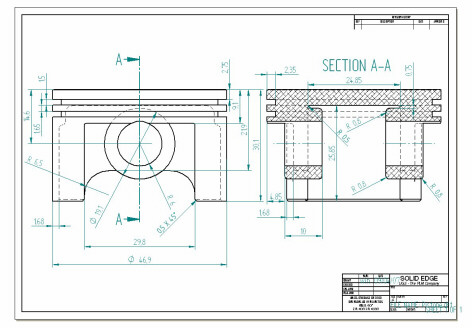
Pistone
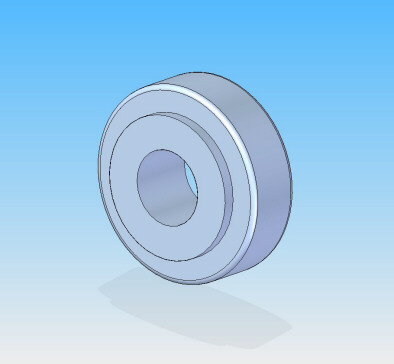
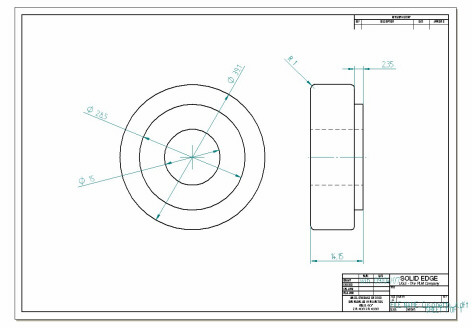
Cuscinetto
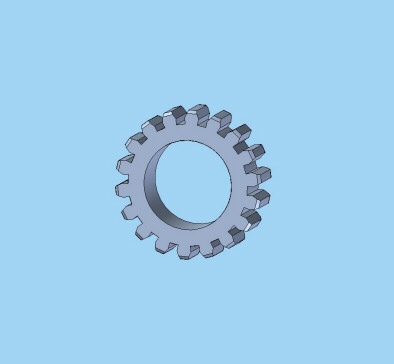
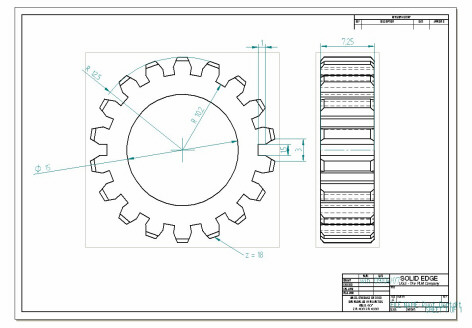
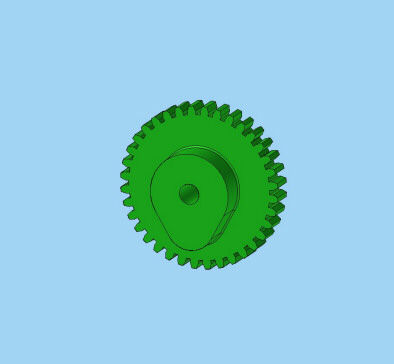
Ruota dentata
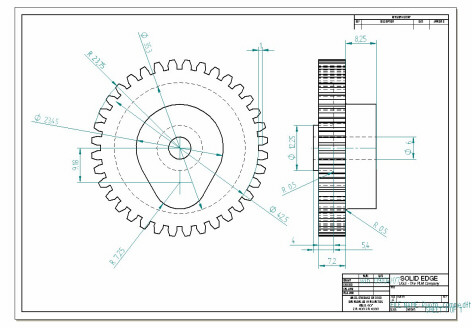
Ruota a Camme
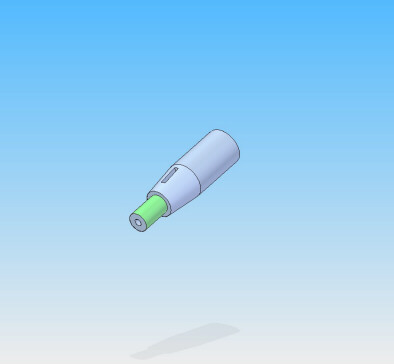
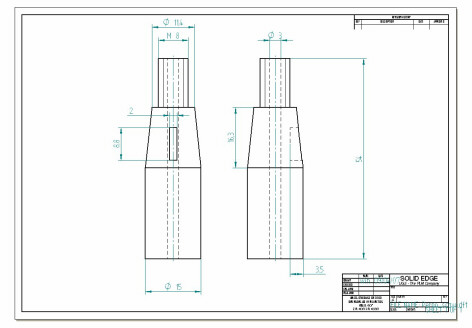
Perno scavato
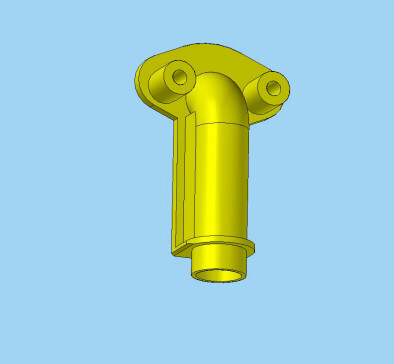
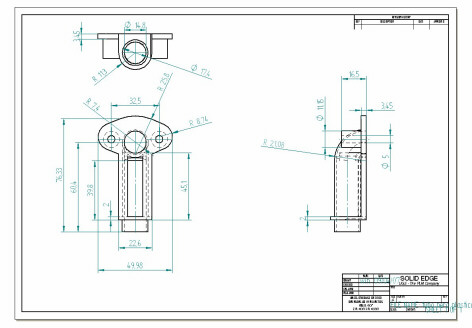
Collettore
Tubo per l’immissione del combustibile
Tappo trapezoidale
Tappo Superiore
Tappo Inferiore
Pezzo moto della valvola

Contrappeso

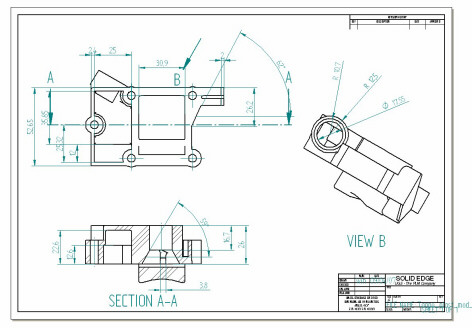
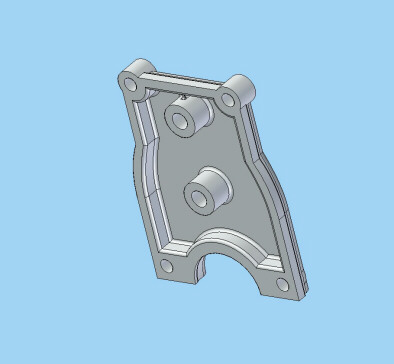
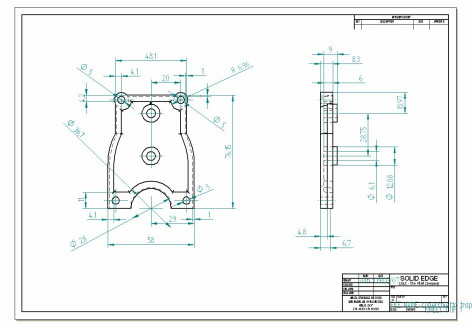
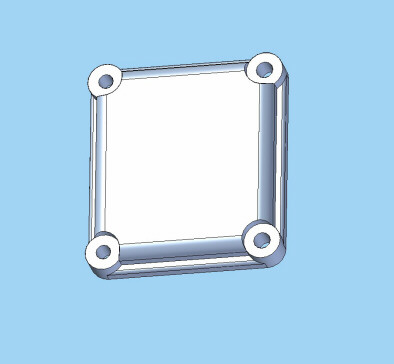
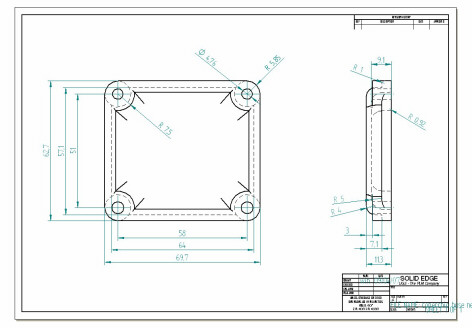
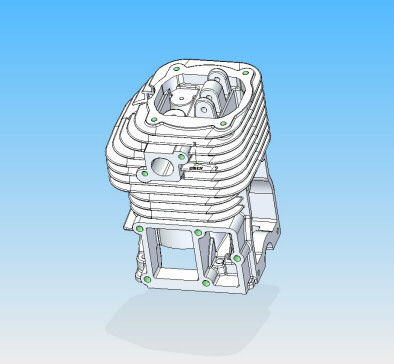
Parte centrale del motore
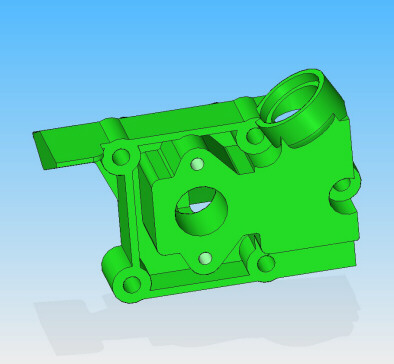
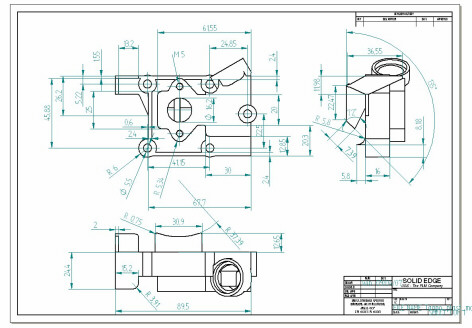
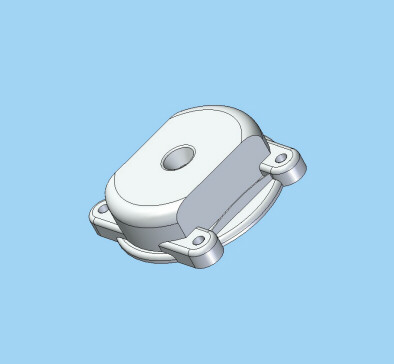
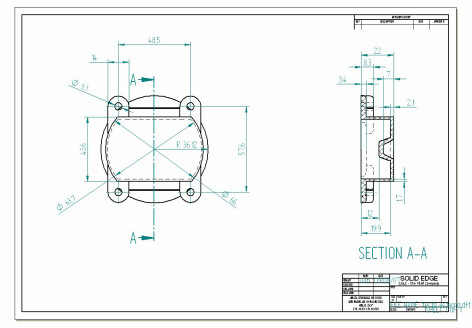
Carter
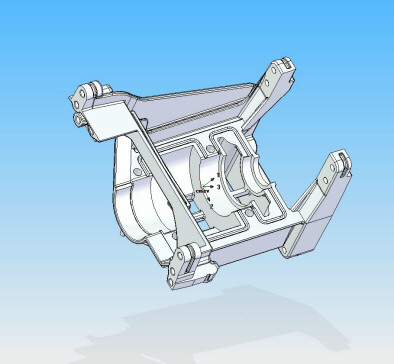
Diversamente da tutti gli altri pezzi, il Carter e la Parte centrale del motore ci sono state fornite tramite l'utilizzo della tecnica del Reverse Engineering.
Riportiamo di seguito una breve trattazione sull'argomento.
Riverse Engineering
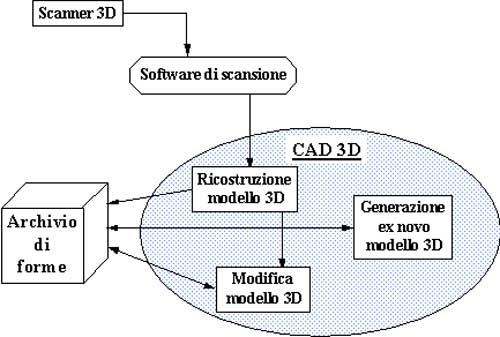
Per la modellazione del carter e della parte centrale del motore si è utilizzato il procedimento di Riverse Engineering, reso necessario per la complessità geometrica delle parti in questione.
Tale applicazione consente di recuperare delle forme già esistenti ed eventualmente effettuare delle operazioni di modifica su esse tramite software di modellazione solida (CAD 3D). Ciò permette inoltre di recuperare il patrimonio di forme (modelli fisici) inserendole eventualmente in un data-base (Archivio di forme) dove rimarranno sino a che non siano giudicate utili; solo a quel momento verranno prelevate, elaborate, modificate se necessario e quindi processate per l’utilizzo.
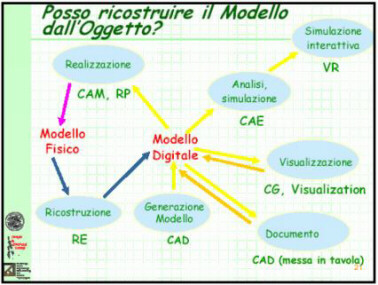
Con il termine Reverse Engineering (RE) si individua una metodologia che consente, partendo dal modello fisico, di risalire alla sua descrizione matematica. Dalla nuvola di punti, ottenuta dal processo di tastatura con o senza contatto, è quindi possibile matematizzare l'elemento, in modo idoneo alla successiva prototipazione.
E’ dunque un'evoluzione di quanto avveniva nel passato nelle officine di costruzione stampi, con i primi sistemi di copiatura che permettevano esclusivamente la replica senza modifiche dei master realizzati negli istituti di modellazione.
La riproduzione per intero del modello matematico dell’oggetto solido in questione può essere utile in vari campi applicativi:
-
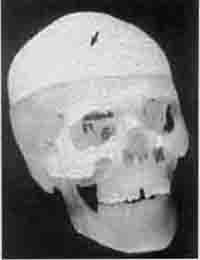
nel caso di reperti archeologici può fornire una soluzione rapida ed efficiente per duplicare e conservare campioni di difficile manipolazione, può permettere di creare una banca dati accessibile anche a notevoli distanze, infine può essere utile per creare imballaggi;
|
|
|
|
(modello matematico) |
(modello fisico) |

-
nell’ambito industriale permette di chiudere il distacco tra CAD-CAM e prototipazione rapida (Rapid Prototyping), e molto spesso costituisce il punto di partenza per un nuovo progetto, oppure per il rinnovamento estetico del prodotto;
-
in campo biomedico consente di preparare modelli di organi e parti anatomiche, utili per la preparazione di protesi o per l’addestramento del personale ;
-
per la realizzazione di modelli adatti al corpo umano (calzature, guanti, casco,..);
-
per generare un modello CAD se si ha a disposizione il modello realizzato a mano dal modellista, oppure dal designer;
-
per la creazione di archivi di componenti standardizzati utili ad accelerare le operazioni di progettazione nell’industria.
Il ciclo della Reverse Engineering
Per ricostruire la geometria tridimensionale di un oggetto si deve seguire un ciclo composto da quattro fasi.
|
|
|
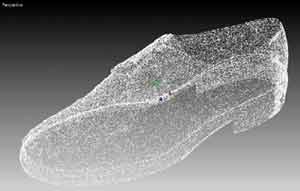

Il punto di partenza per il processo di costruzione del modello è l’acquisizione di nuvole di punti, cioè di punti nello spazio appartenenti alle superfici del solido.
Successivamente si cerca di estrarre dalla nuvola di punti, in modo automatico o semiautomatico, un insieme di primitive CAD che approssimano il solido. Il file contenente le informazioni ottenute dal dispositivo di rilevazione deve essere preliminarmente ottimizzato attraverso opportuni filtri; solo successivamente la nuvola di punti può essere convertita in un formato neutro (IGES, VDA, STEP, …) od importata direttamente nel software utilizzato per la modellazione.
A partire dal modello matematico realizzato, le operazioni successive consentono di generare modelli STL da inviare ai sistemi di prototipazione o di generare formati grafici per successivi trattamenti (rendering) o ancora per generare il database delle forme acquisite.
|
|
|

Metodi e dispositivi di rilevazione dei punti
Parlando di sistemi per il rilievo dei punti sui modelli fisici il pensiero corre subito alle macchine di misura delle coordinate (CMM) oppure ai tastatori meccanici montati su fresatrici a controllo numerico. Nonostante essi siano molto diffusi, affidabili e precisi, incominciano però ad essere sostituiti da nuovi sistemi senza contatto, non altrettanto precisi, che in parte risolvono il problema della lentezza dei sistemi tradizionali.
Esistono sul mercato diversi sistemi di cattura dei punti sui solidi, che differiscono tra di loro essenzialmente per velocità, precisione, dimensioni del volume di lavoro.
E’ necessario distinguere tra sistemi di digitalizzazione e sistemi di scansione:
· con il termine digitalizzazione si intende il rilievo delle coordinate di alcuni punti, su di un elemento fisico, i cui valori nominali sono preventivamente definiti e memorizzati nel codice che pilota la macchina di misura o la fresatrice attrezzata con tastatore meccanico
· con scansione si intende l'acquisizione continua delle coordinate di punti in un volume di lavoro preventivamente definito; in questo caso i movimenti della macchina utensile o della macchina di misura sono comandati dalla sonda che si muove su di una superficie ignota.
Spesso però questi due termini vengono confusi, tanto che abitualmente si utilizza il termine di scansione anche per indicare l’acquisizione dei dati relativi a punti discreti.
Entrambi i sistemi sono normalmente costituiti da:
-
dispositivo di tastatura con o senza contatto, cioè dall’insieme di trasduttori e sonde che consentono di rilevare i punti;
-
apparato di supporto e trasporto, che permette il posizionamento nello spazio del trasduttore, rilevandone la posizione e l’orientamento, consentendo quindi il rilievo di oggetti di varie forme e dimensioni;
posizionatore del pezzo costituito, qualora esista, da una tavola rotante sulla quale si blocca il componente da rilevare.