La flangia maschio è senza dubbio quella meno complessa e delicata, perciò si è pensato di collegare questa alla piastra con le ventose. Per utilizzare il sistema da noi progettato, infatti, si dovrà avere una flangia maschio per ogni piastra mentre le flangia femmina sarà unica e fissata al braccio del robot; rispetto alla soluzione alternativa (collegare la flangia femmina alla piastra) questa soluzione assicura notevoli vantaggi dal punto di vista realizzativi ed economico.
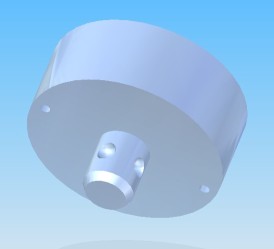
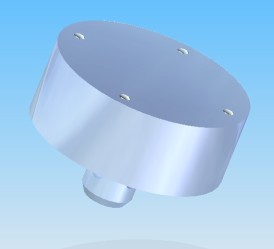
Questa flangia è formata da un unico
componente di diametro non uniforme con spessore complessivo pari a 80 mm: una
parte con diametro 115 mm e spessore 45 mm ed una parte, che si inserirà nel
foro centrale della flangia femmina, con diametro 30 mm e spessore 35 mm. Per
facilitare l’accoppiamento delle due flangie è presente uno smusso di altezza 5
mm e angolo 30° sul corpo cilindrico di diametro 30 mm.
Sempre sullo stesso corpo cilindrico sono presenti le quattro sedi sferiche sulle quali si posizionano le sfere durante l’esercizio. Esse sono posizionate a 15 mm dal corpo cilindrico a diametro 115 mm e non sono delle semisfere perfette poiché si ricorda che le sfere restano per un millimetro all’interno della flangia con le sfere. Nella faccia inferiore del corpo cilindrico a diametro 115 mm si trovano le due sedi per le spine coniche. Le sedi sono poste a 50 mm dal centro della flangia, hanno diametro 6 mm e sono profonde 28 mm. Sul lato opposto del corpo cilindrico si trovano quattro fori filettati M8 a distanza 47,5 mm dal centro della flangia profondi 40 mm. In questi fori verranno inserite quattro viti a testa esagonale M8 che fisseranno la flangia con la piastra.