We focused on the real behavior of the knee movement in order to achieve a system which was able to follow the motion of the knee, without forcing the ligaments with a not natural kinematic.
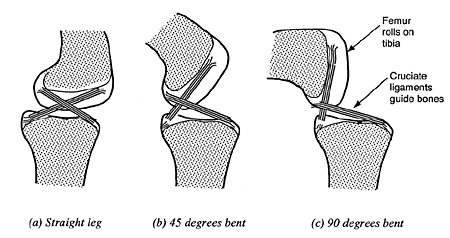
In fact, after some researches, we found that the knee does not simply rotates around a fixed point, as we once imagined by watching it from the outside, instead, it behaves as a 4 bar linkage. That was the first problem we faced, but not the only one, because it was also rather complex to decide which was the best way to induct the motion of this 4 bar system, considering that in a 2D scheme it’s just a one degree of freedom system.
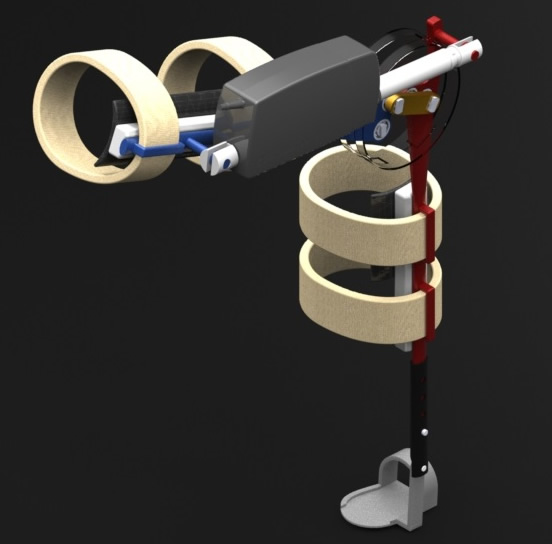
A following design feature, which was also difficult to solve, was to find some motor that is able to generate such a large force without being too big and heavy (and so hard to support). Strictly related to that, it was the problem of selecting the best kind of motion to apply: rotation or translation.