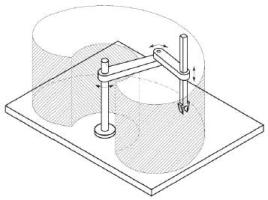
La soluzione alternativa da noi ideata si è ispirata al meccanismo del robot S.C.A.R.A. Si tratta di un meccanismo a catena aperta, il cui moto è, in generale, impartito attraverso motori posti in corrispondenza dei giunti.
La struttura meccanica o manipolatore consiste di un insieme di bracci rigidi, o giunti, interconnessi tra loro mediante opportune articolazioni. L'ultimo giunto è detto end-effector ed è solitamente specializzato al fine di poter attuare un qualche particolare compito.
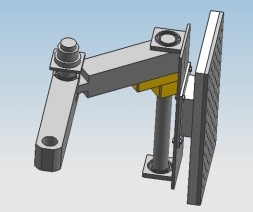
I motori elettrici impiegati, grazie a tale meccanismo, potranno avere una potenza inferiore di quella prevista per il motore utilizzato nella soluzione originale.
particolare da non trascurare è il fatto che il moto sull'asse lineare per l'adeguamento alla velocità dei pannelli è stato trasferito dal basamento all'end-effector. in tale modo le dimensioni del basamento possono essere ridotte consentendo un notevole risparmio di spazio.