LA DINAMICA
Dopo aver analizzato l’aspetto cinematico del progetto, è ora possibile analizzare e calcolare le forze scambiate dai componenti del cinematismo.
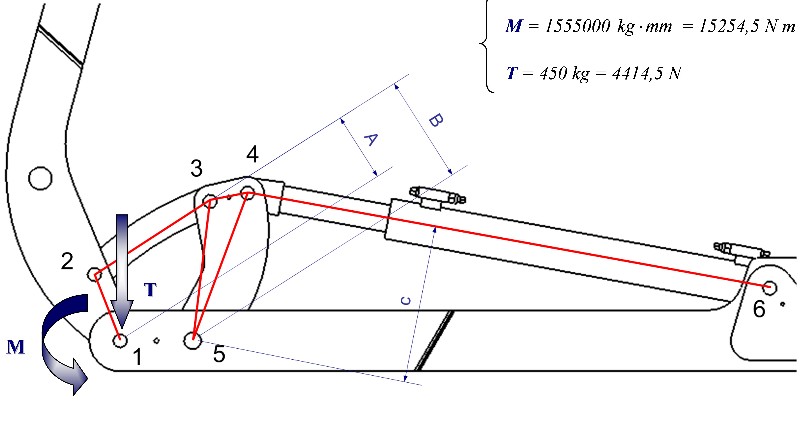
Basandoci sui disegni e sulle specifiche, le forze agenti possono essere schematizzate con una forza verticale T, dovuta solo al peso del braccio in rotazione, e un momento M che racchiude al suo interno i contributi sia della forza peso che del movimento dei bracci. Entrambi i carichi sono applicati sullo snodo, come mostrato in figura, e possono essere considerati costanti per qualsiasi configurazione del sistema. Per questo motivo gli andamenti delle forze che verranno determinati non rispecchiano fedelmente quelli reali. Ciò comunque non induce alcun errore, in quanto porta ad un dimensionamento della struttura in eccesso rispetto al carico massimo.
A questo punto è possibile calcolare le reazioni vincolari e le forze agenti su biella e su pistone a seconda della variazione delle dimensioni A,B,C che governano l’intero meccanismo. Trovata la situazione più critica per il sistema, si procederà alla verifica di resistenza dei componenti più fortemente sollecitati. Di seguito sono riportate le equazioni di equilibrio alla rotazione e alla traslazione utilizzate nello studio della dinamica.
Effettuando l’equilibrio alla rotazione nello snodo 1, si ottiene:
![]() da cui si ricava
da cui si ricava 
Fb = è la forza che agisce in direzione longitudinale rispetto alla biella
In modo analogo si può scrivere l’equilibrio alla rotazione rispetto allo snodo 5 per ricavare la forza che lo stantuffo esercita sulla forcella.
![]() da cui si ottiene
da cui si ottiene ![]()
Sostituendo l’espressione di Fb si ricava ![]()
A questo punto è possibile visualizzare tutte le forze e reazioni vincolari che sollecitano il meccanismo:
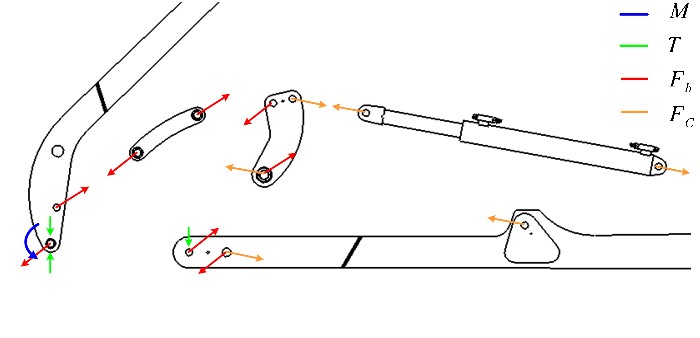
Come mostrato nelle figure precedenti, le grandezze A,B,C rappresentano i bracci delle forze agenti su biella e su pistone, i quali dipendono dagli angoli relativi tra i componenti. Sono quindi funzione della configurazione, ovvero variano al variare dell'apertura del braccio. In particolare i tre bracci hanno la seguente espressione:
Essendo completamente nota la cinematica del meccanismo, è possibile rappresentare la variazione delle due forze in funzione per esempio dell’angolo teta1. Si è deciso di calcolare le forze Fb e Fc per ogni 10° di variazione dell’angolo del braccio (tranne nella fase iniziale).