
|
politecnico di milano |


|
Laboratorio progettuale CAD - A.A. 2010/2011
|
|
Modellazione CAD e analisi multibody |
|
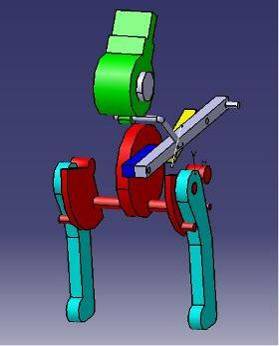
Una volta ottenuta la geometria è stato possibile modellare il sistema al CAD. Grazie a esso abbiamo esaminato gli ingombri del meccanismo e le interferenze, rimodellando di conseguenza i pezzi. |
|
Fig. 8 Assemblaggio all’interno di Catia V5R18. |
|
È possibile notare nella figura 8 che il disco è stato modellato in modo da non interferire con gli altri corpi durante tutte le manovre, come è visibile nei video caricati in questa pagina. |
|
Dopo aver terminato l’assemblaggio in Catia, sì è importato il file all’interno dell’ambiente del software per l’analisi fisica Virtual-Lab. Questo software ha un’interfaccia molto simile a quella di Catia ed è del tutto compatibile con il CAD. Abbiamo scelto di impiegare questo programma in quanto Catia e Inventor non si sono rivelati altrettanto performanti nell’analisi dinamica quanto V-Lab. Esso permette infatti di gestire facilmente i gradi di libertà del meccanismo, oltre alle mutue azioni fra i vari componenti fornendo anche una stima delle forze scambiate tra un pezzo e l’altro. Si tratta inoltre di un software impiegato da ABB per le simulazioni dinamiche.
PRIMA MANOVRA
Segue il video che mostra la simulazione della manovra di sgancio eseguita su V-Lab.
|

|
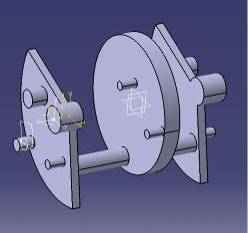
Fig. 9 Dettaglio del disco |
|
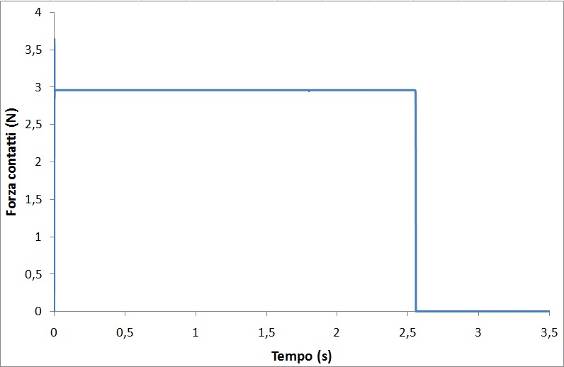
Di seguito un grafico che riporta la forza di reazione dei contatti. Essa è di 300 g = 2,94 N. Si nota che ovviamente questa forza va a 0 nel momento in cui il meccanismo interrompe il contatto.
|
|
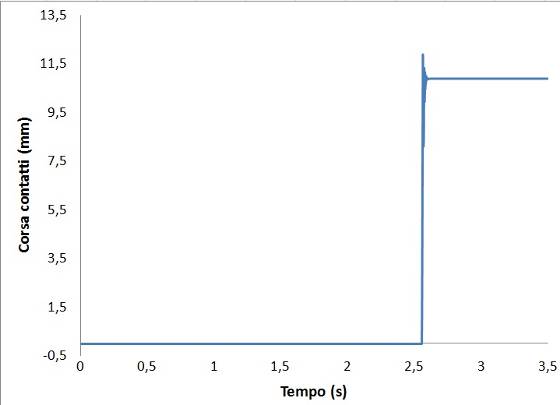
La corsa dei contatti risulta essere superiore ai 7 mm minimi richiesti, ciò a beneficio di sicurezza poiché una distanza maggiore permette di scongiurare la nascita di un arco elettrico non desiderato nel circuito. |
|
SECONDA MANOVRA
|
|
Come si può vedere la manopola torna nella condizione che prevede l’intervento dell’operatore per riarmare il congegno, tutto ciò rispettando gli 80° di escursione previsti nei requisiti.
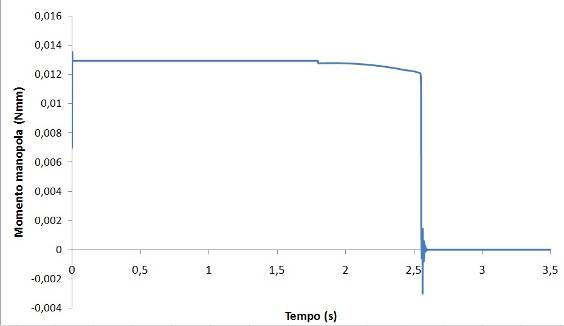
Fra i risultati che emergono dalla prima manovra si nota che, dopo lo sgancio, la forza agente sulla manopola da parte del sistema è praticamente nulla.
|
|
Ciò permette di eseguire la seconda manovra con una molla della manopola con una coppia qualsiasi.
Di seguito un filmato che mostra il disco e i leveraggi da un’altra prospettiva in modo da poter osservare come sono state scongiurate eventuali interferenze sagomando opportunamente il disco. |
|
TERZA MANOVRA
In seguito al termine della seconda manovra ci si trova in una situazione che, come ci hanno confermato gli ingegneri di ABB, è molto comune nella progettazione di cinematismi di questo tipo e risulta essere la più critica. Infatti dopo il rientro della manopola il sistema dovrebbe porsi in una posizione che preveda che essa sia completamente aperta e il resto del meccanismo pronto per il riarmo. La seconda manovra porta quindi a trovarsi in una configurazione diversa da quella di partenza, che può risultare non compatibile con il riarmo. Anche in seguito a una serie di prove e modifiche del cinematismo, effettuate tipicamente in questi casi, non si è giunti a uno stato compatibile con la terza manovra. Questa è un’indicazione che dimostra che il cinematismo non si presta facilmente a essere utilizzato all’interno di un interruttore. Si potrebbe pensare di provare altre configurazioni fornite dallo script, ma in questo caso si rinuncerebbe all’obiettivo principale che ha avuto l’analisi, ossia la minimizzazione della forza di sgancio. Si dovrebbero quindi porre sul piatto della bilancia la convenienza a utilizzare un cinematismo che, di per sé, non è ottimizzato per la funzione che deve svolgere e l’eventualità di sperimentarne altri intrinsecamente più efficaci.
A questo punto desideriamo esprimere la nostra riconoscenza agli ingegneri della ABB di Vittuone che ci hanno consigliati e sostenuti durante l’esecuzione di questo elaborato. Vogliamo inoltre ringraziarli per averci messo a disposizione una piattaforma per l’utilizzo del software Virtual-Lab, fornito in dotazione all’azienda.
|
|
Viene ora inserito un filmato che mostra il conteggio del tempo impiegato dal meccanismo a interrompere il contatto elettrico. Si osserva che l’operazione viene eseguita in 12 ms, un tempo inferiore a quello previsto dai requisiti.
|
|
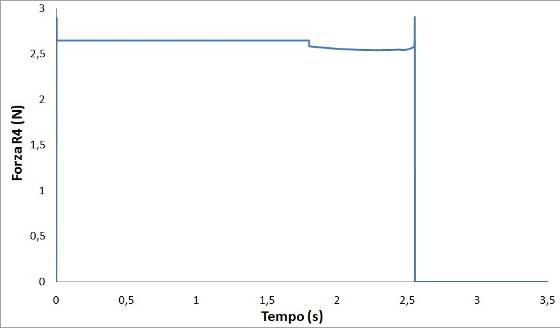
La forza di sgancio R4 ottenuta risulta di 2,89 N. Essa è superiore a quella calcolata nello script di Matlab in quanto si sono trascurati nei passaggi analitici alcuni fattori come l’attrito fra le varie superfici di contatto e la massa di tutti gli elementi. |