Ginocchio con pistone

Cinematica ginocchio
Lo studio della cinematica della protesi è forse l’aspetto più importante nella sua progettazione. Infatti è proprio la cinematica che distingue le singole protesi, e conferisce alle stesse il livello di mobilità caratteristico. Inizieremo analizzando la cinematica del ginocchio umano e le caratteristiche del cammino in soggetti non amputati, per successivamente studiare la cinematica del ginocchio con pistone in funzione dei suoi requisiti.
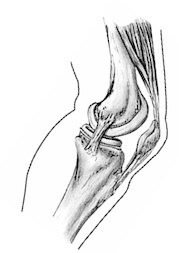
CINEMATICA GINOCCHIO UMANO
Il ginocchio è costituito dall’articolazione femoro - tibiale e dal
l’articolazione femoro - rotulea.
Durante la flesso-estensione, il movimento avviene su tutti i
piani dello spazio; il movimento, dalla completa estensione alla
completa flessione, varia da 0° a 140°. Nelle situazioni più ti-
piche invece vale:
- nella marcia: 0° - 67°
- salire e scendere le scale: 0° - 90°
- sedersi: 0° - 90°
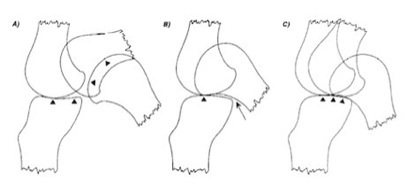
Nella flesso-estensione il movimento è di rotolamento e sci-
volamento. Il rapporto tra i due movimenti è variabile; a partire
dalla estensione massima comincia la fase di rotolamento alla
quale di aggiunge quella di scivolamento che diventa la sola
componente negli ultimi gradi di flessione. L’immagine sotto chiarisce quanto appena spiegato.
Si può intuire che la perfetta riproduzione di un’articolazione umana è molto difficile; la motivazione di quanto appena affermato non è da ricercare nel tipo di cinematismo: la tecnologia attuale permetterebbe di riprodurlo, ma le caratteristiche, le misure e gli angoli caratteristici delle articolazioni di ogni singolo individuo andrebbero replicate singolarmente, con costi spaventosi. Si cerca quindi di avvicinarsi il più possibile alla situazione al cinematismo del ginocchio umano, per garantire una camminata fluida.
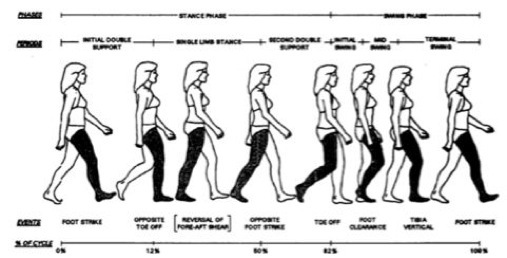
CAMMINATA CARATTERISTICA
Prima di illustrare il cinematismo del ginocchio con pistone, si tiene ad illustrare le fasi fondamentali della camminata. Analizzando la figura sottostante, si osserva (gamba scura in esame) che fino al 50% della progressione di un ciclo completo, la gamba resta pressapoco dritta. In questa fase quindi la protesi può anche mantenersi estesa, senza che questo comporti enormi difficoltà alla persona. La fase finale invece, detta swing, è la più importante. Nel momento in cui il peso viene caricato sulla gamba opposta, e il primo piede viene sollevato, il ginocchio si flette fino a circa 60°. E’ questa flessione che consente di sollevare il piede e riportarlo passivamente in avanti, affinchè possa effettuare un nuovo passo sotto carico. E’ in questa fase che è indispensabile un organo meccanico in grado di permettere la flessione della protesi, e la successiva estensione automatica; quest’organo nella fattispecie è rappresentato dal pistone, meglio analizzato nella pagina “scelta componenti”.
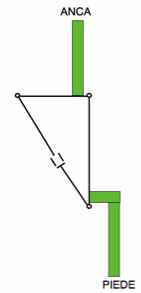
CINEMATICA GINOCCHIO CON PISTONE
Lo schema cinematico del ginocchio con pistone è ben rappre-
sentato dalla semplificazione schematica riportata qui a lato.
Si tratta di un arco a tre cerniere con un’asta deformabile, rap-
presentata nella fattispecie dal pistone. In verde sono evidenzia-
ti l’attacco superiore ed inferiore del ginocchio, rispettivamente
a femore (se presente, altrimenti protesi) e tibia artificiale.
E’ importante osservare che questa tipologia di schema cine-
matico non segue nel migliore dei modi la cinematica del ginoc-
chio umano: infatti il ginocchio policentrico, con un continuo spo-
stamento del CIR asseconda decisamente meglio la roto-
traslazione di ciò che sta a valle del ginocchio.
Sarà importante nel corso della progettazione tenere presente
di tutte le forze in gioco: in particolare sarà fondamentale farsi
un’idea di massima sulla forza che deve essere esercitata dal pi-
stone affinchè la fase di swing sia efficace, e consenta al ginocchio
artificiale la flessione seguita dalla totale estensione. Tuttavia sarà
lasciato un certo grado di libertà al tecnico adibito all’installazione
della protesi affinchè possa seguire le esigenze soggettive del
singolo paziente.

Progetto di Laboratorio Progettuale CAD, gruppo 447 - Russo Amedeo, Salvioli Mariani Marco - AA 2009-2010
